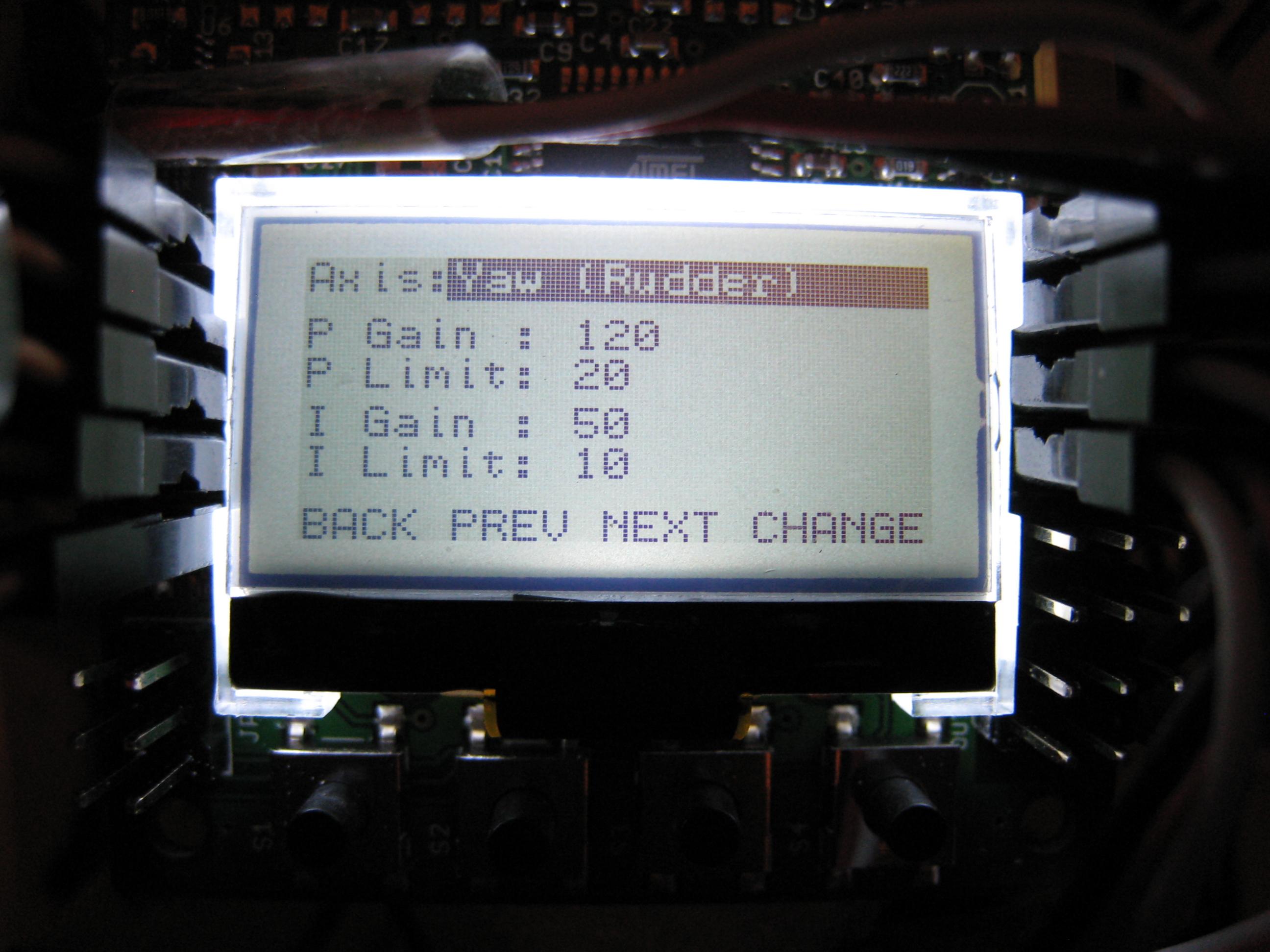

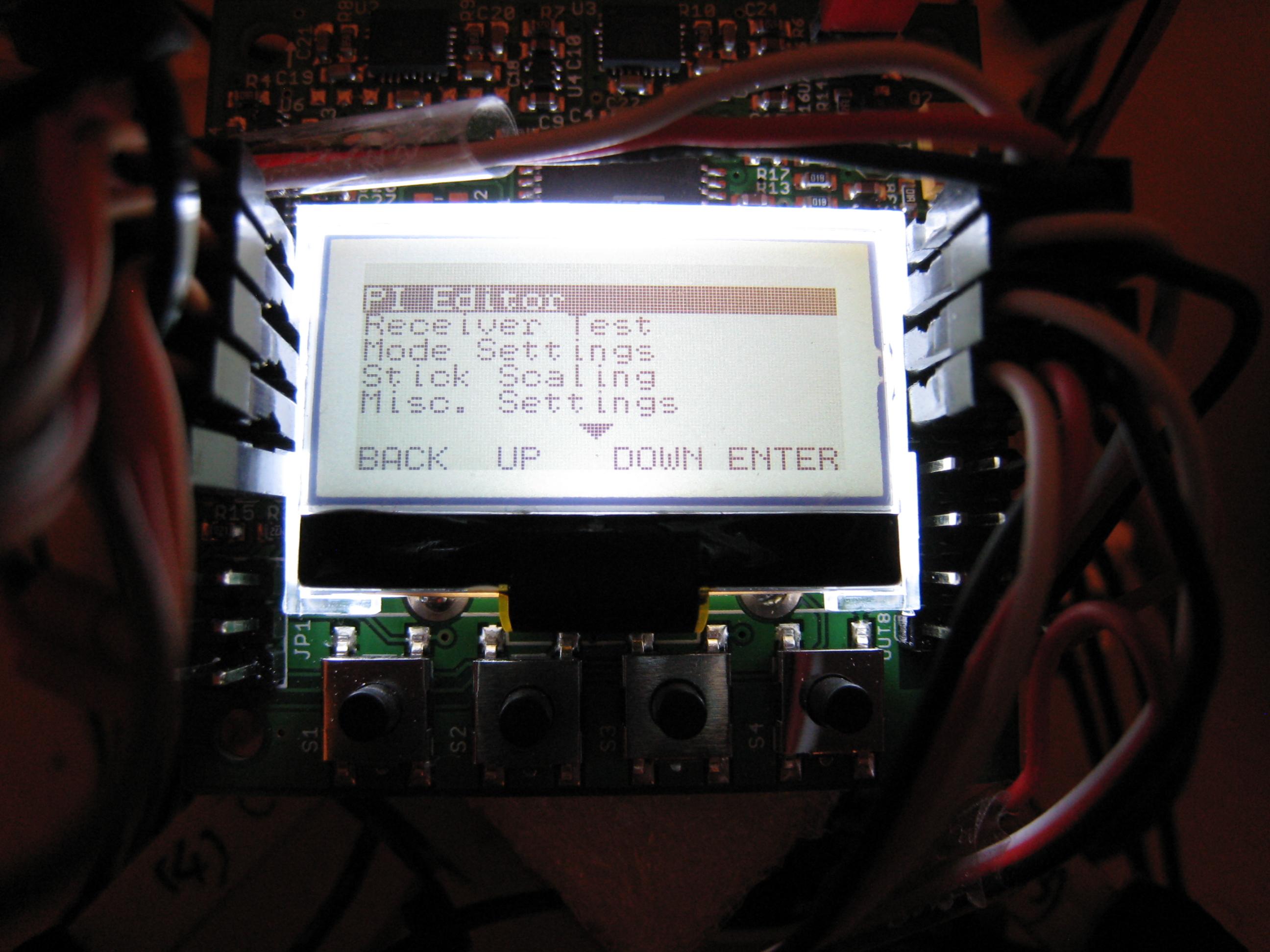
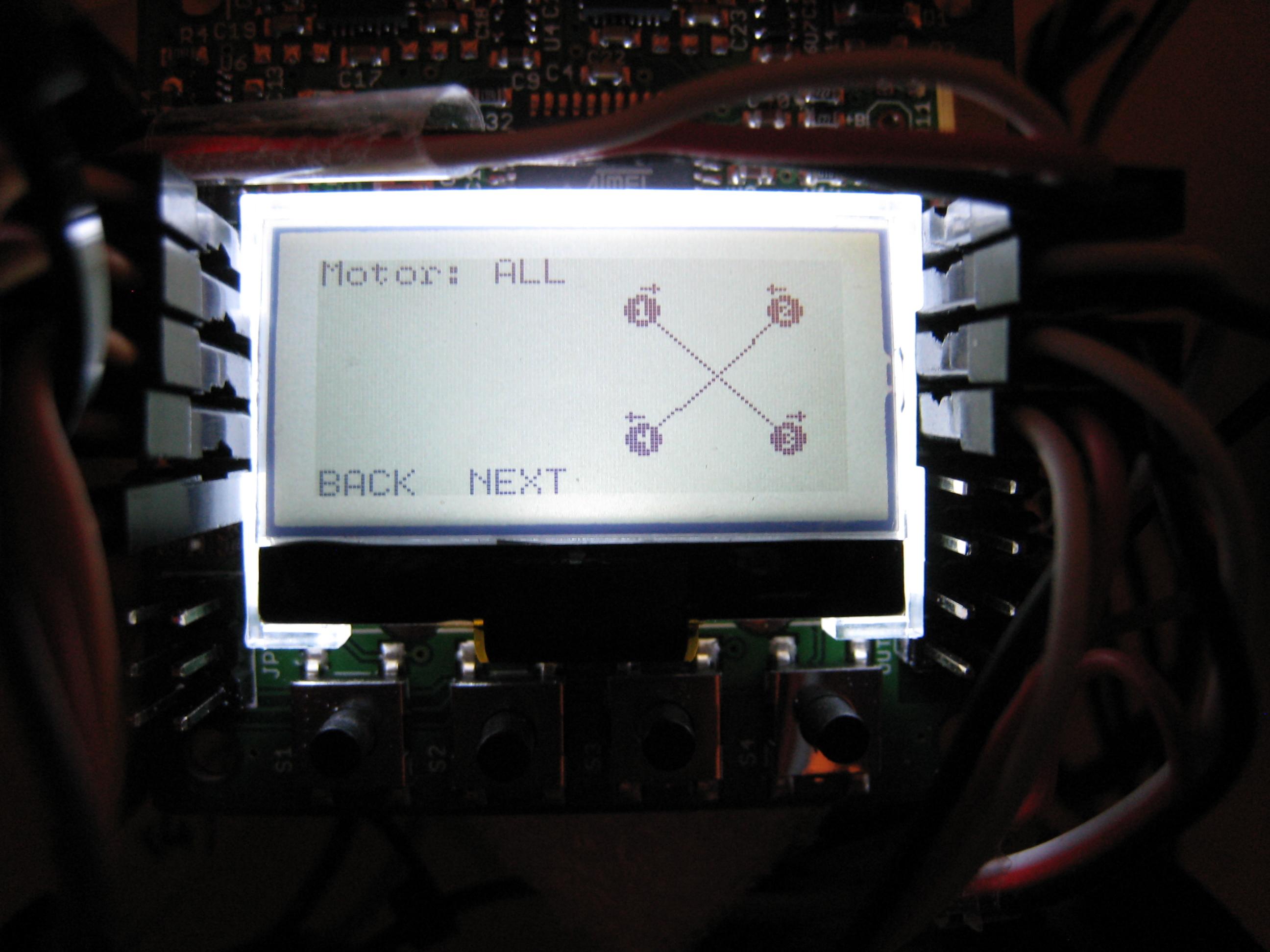
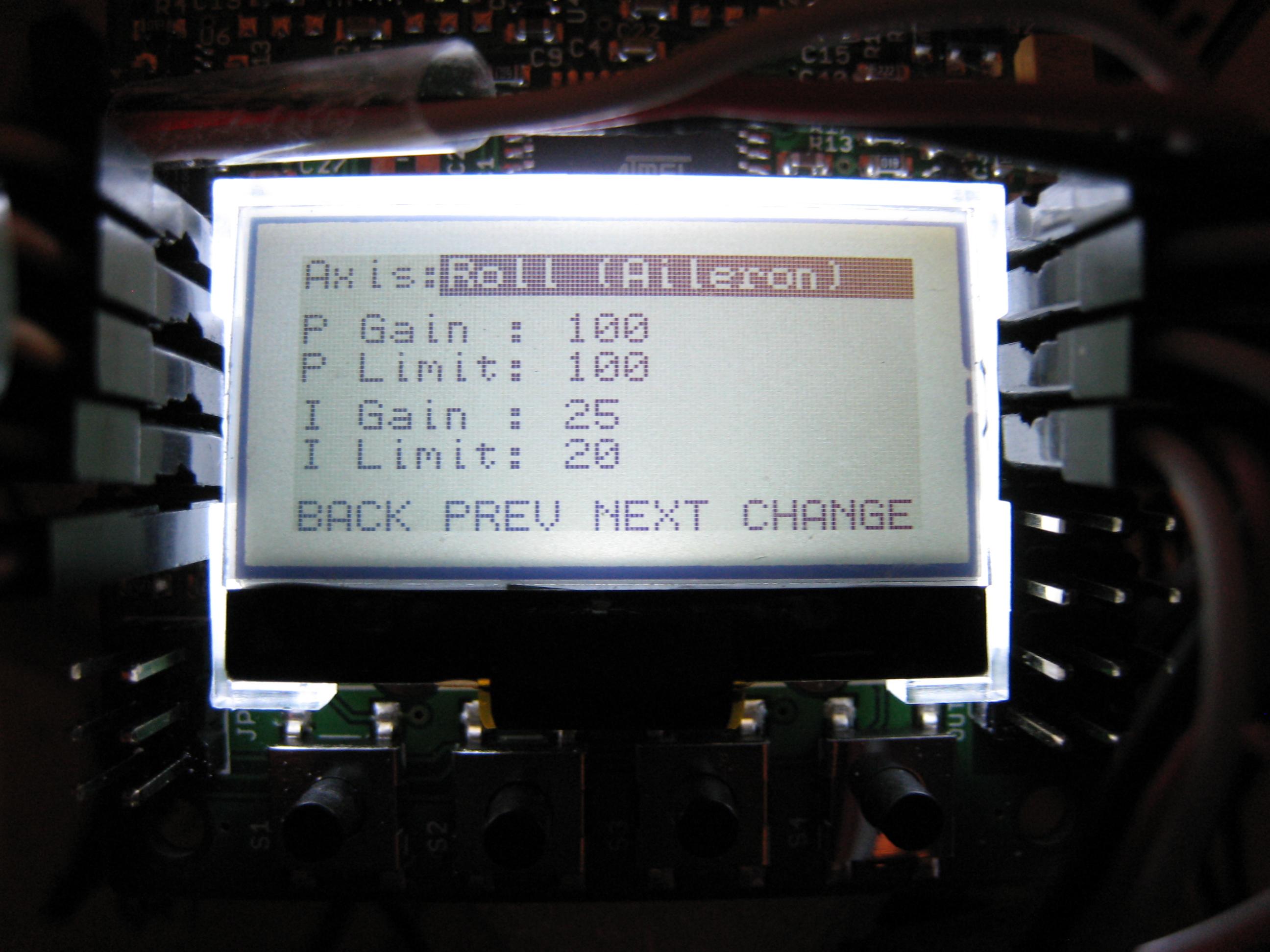
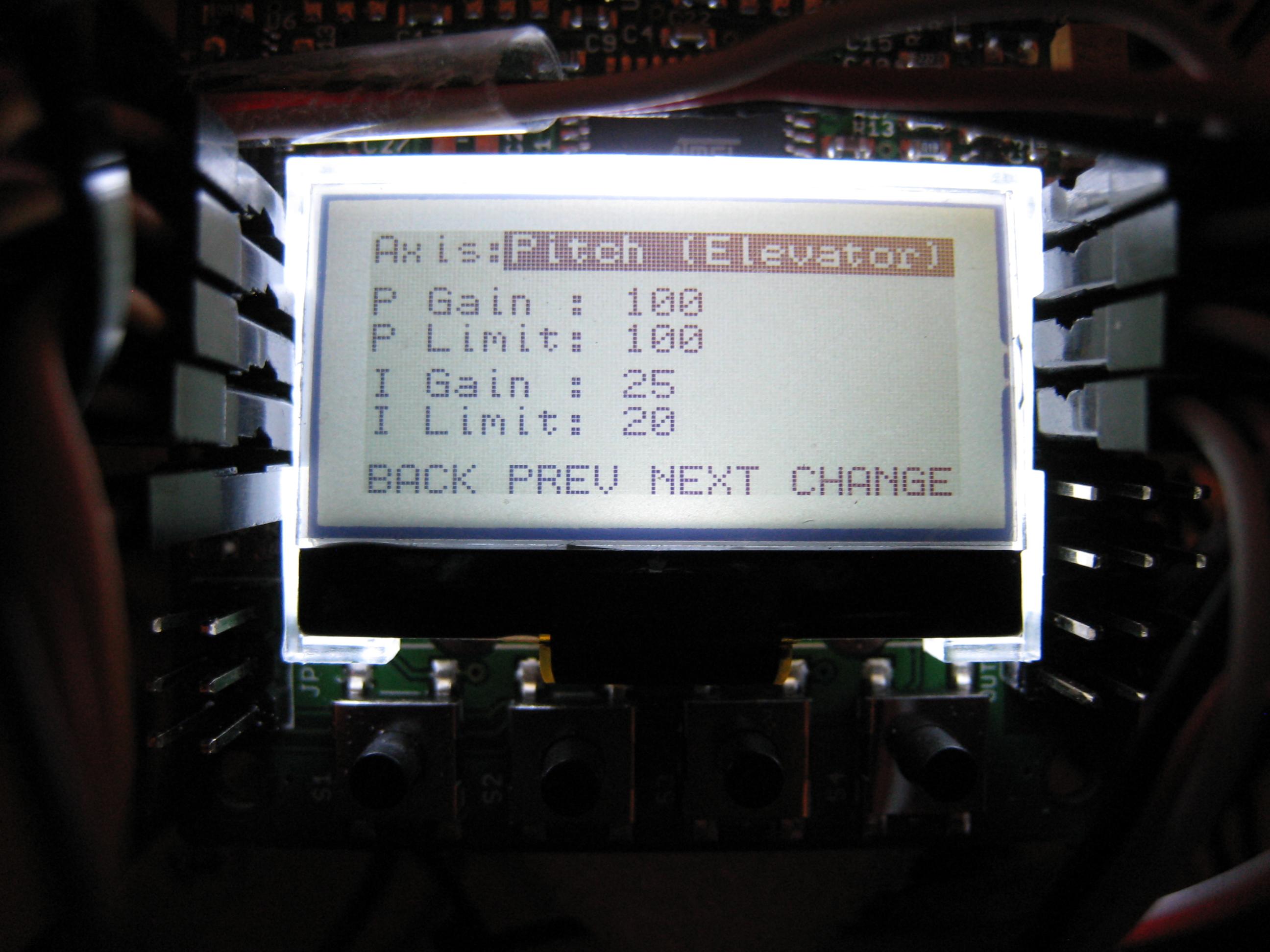
Jetzt mit Onboard-Konfiguration mit hochauflösendem Display, Piepser und zusätzlich: Beschleunigungssensoren. Cool!
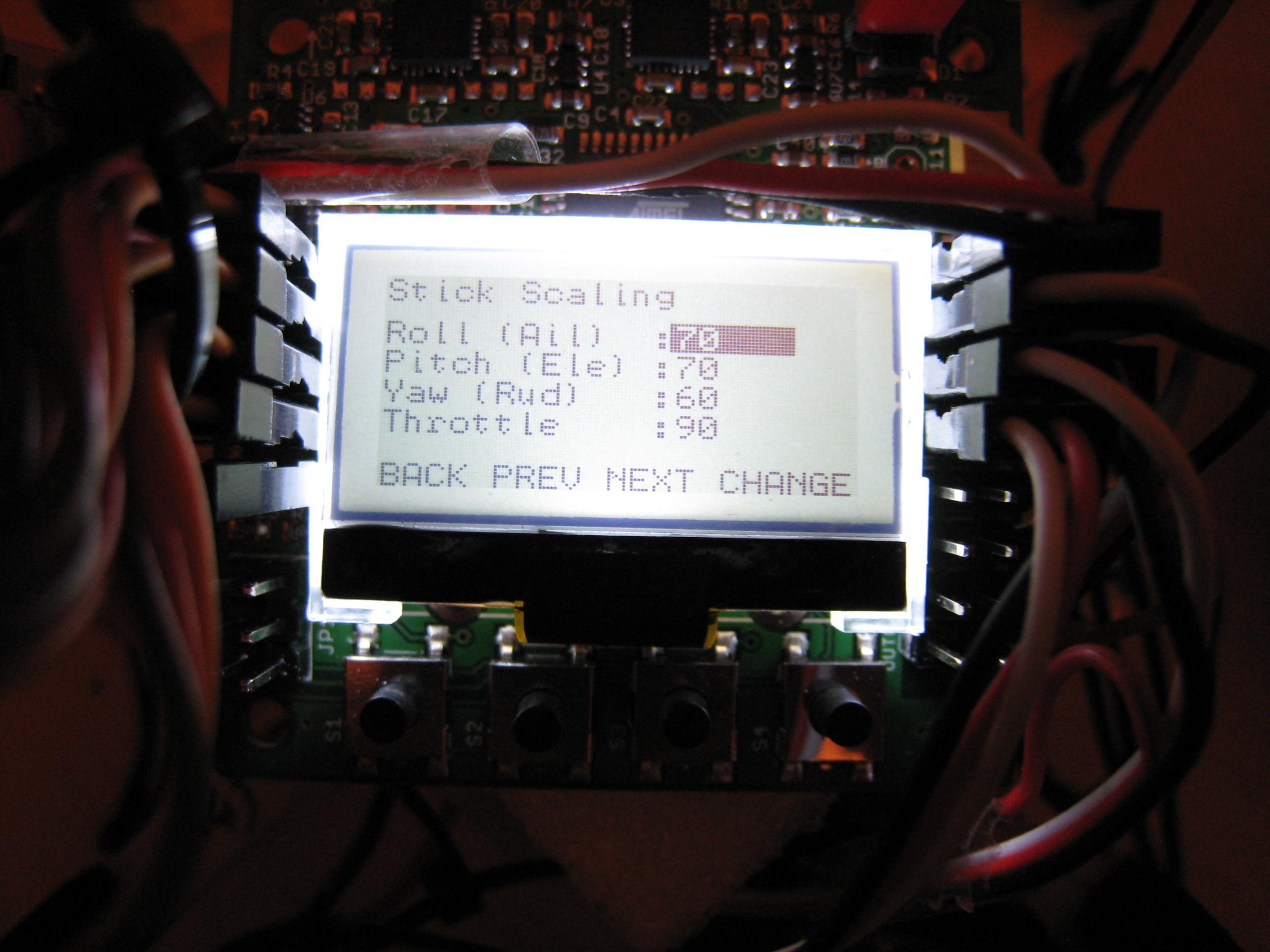
Eingestellt nach einem Forumsbeitrag, getestet und im Garten für gut befunden.
Jetzt mit Onboard-Konfiguration mit hochauflösendem Display, Piepser und zusätzlich: Beschleunigungssensoren. Cool!
Eingestellt nach einem Forumsbeitrag, getestet und im Garten für gut befunden.
Heute war ich mit Kamera in der Luft – Helmut als „Spotter“ auch dabei.
Erst mal den Easystar ohne FPV mit 35MHz Gurkenfunke (vom Condor übrig) einfliegen – Höhe zu stark, muss ich am Servo umbauen. Inbus nicht dabei 🙁 also Servoarm umschrauben. Zweiter Versuch: besser
Jetzt mit Video, erst mal den Flieger auf Höhe bringen. Dann setzt mir Helmut meinen „Helm“ auf. Video ist ganz ok, allerdings reißt die Verbindung gerne mal ab. Ich muss die Cloverleaf-Antenne bauen!
Auf 35MHz Richtung Süden reißt die Fernsteuerung ab – Notlandung, nichts passiert. Fazit: Ich brauch auch 5,8GHz Video…
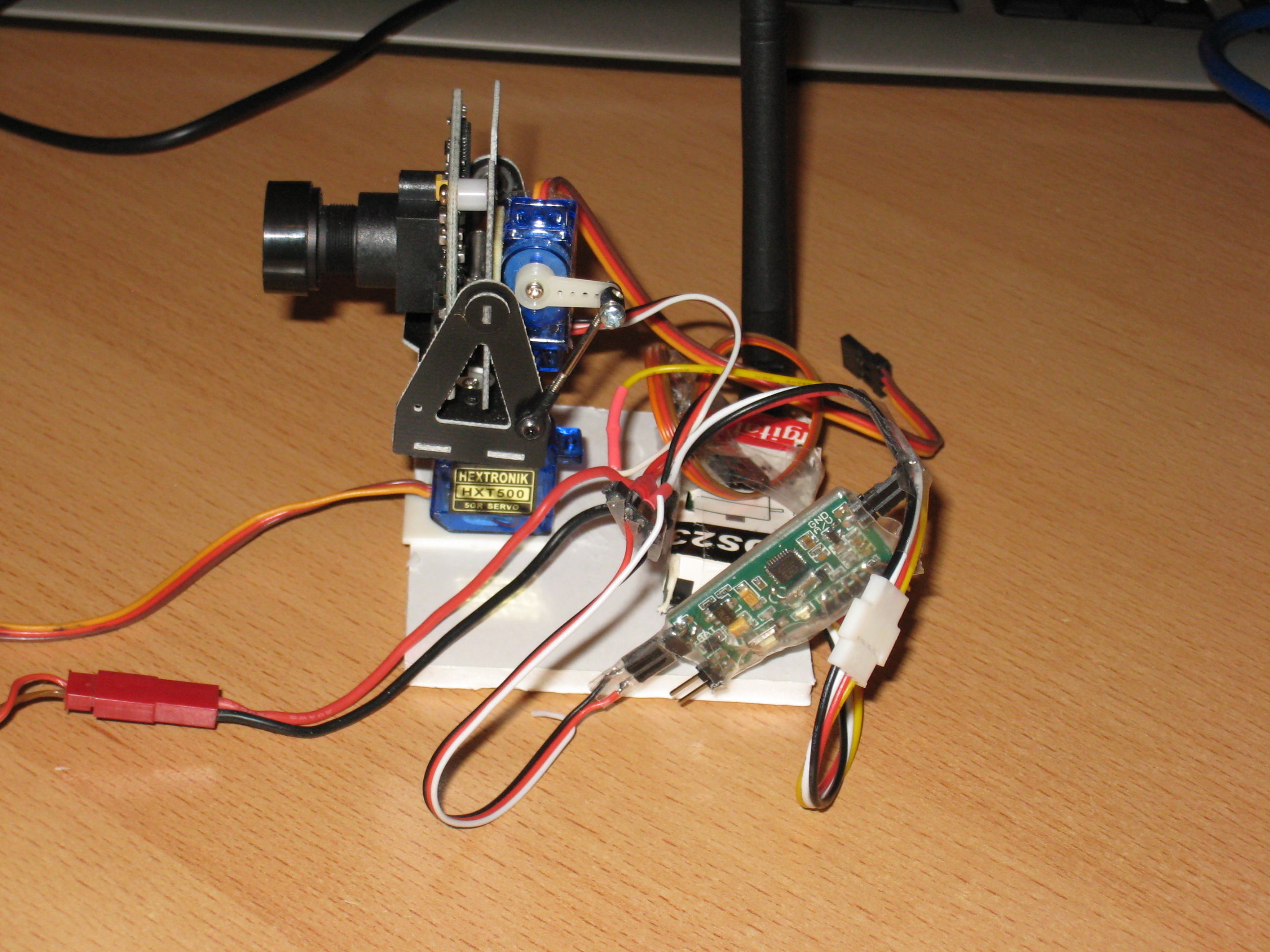
Die Bildqualität der 420TVL-Kamera vom King ist nicht so prickelnd – viel zu wenig Dynamik. Sichtfeld ist ok, könnte noch etwa weiter sein. Grob geschätzt sind es eh nur 100°… also Anschaffung einer GoPro planen. Oder die Pixim Seawulf 69, die ist dynamikmäßig super.
OSD: Muss ich umbauen und CL-OSD drauftun. Lesbarkeit ist gut, aber nur eine Spannung wird angezeigt. Das passt so nicht.
Zum Fluggefühl: Ist schon toll, so hoch oben zu sein. Die Sicht ist nicht super: Dynamik zu schlecht (Himmel überstrahlt, Boden fast schwarz, kaum Farben) und das Sichtfeld ziemlich eng. Und Helmut warnt dauernd: Zu weit weg, zu tief… also muss ich immer wieder umkehren. Und auch mal wieder den Motor anmachen und wieder Höhe gewinnen. Ab da wird die Funkverbindung schlechter. Und nach einer Runde gegen Süden merke ich, dass der Flieger sich nicht mehr gut steuern lässt, er will nur noch nach links und kippt. Also lasse ich mir den FPV-Karton von Helmut abnehmen. Und zeigen wo der Flieger ist, denn ich habe keine Ahnung 🙂 Sah die Welt ja bisher von oben. Der Flieger ist einen Acker weiter Richtung Süden. Dann gebe ich mal Gas – nur kurzes Rucken am Motor zu hören – also schlechte Funkverbindung, ich kann nicht steuern. Ich stelle hilflos an Höhe und Seite rum, bis der Flieger zum Glück in normaler Lage hart im Acker landet. Ich berge ihn unbeschädigt.
Dann noch Helmuts FunJet in die Luft gebracht – da war noch viel zu tun: Schwerpunkt falsch, Propeller nicht ausgewuchtet 🙂
Zum Glück hatte ich alles Werkzeug (Ausnahme kleiner Inbus) dabei.
Ich flog dann den Funjet gleich ein mit Helmut als Werfer. Nachdem er getrimmt war, übergab ich den Sender und Helmut flog einige Runden (immer linksdrehend).
Dann musste Helmuts Sohn und Helmut damit heim. Vorher warf er noch meinen Funjet, da flog ich den Akku auch noch halb leer. Den Rest der Zeit verbrachte ich mit Dogfighter, Stryker und schrottete auch gleich die Miniviper (zu wenig Höhenruderwirkung) – nur ne Fleischwunde, hihi!
So:
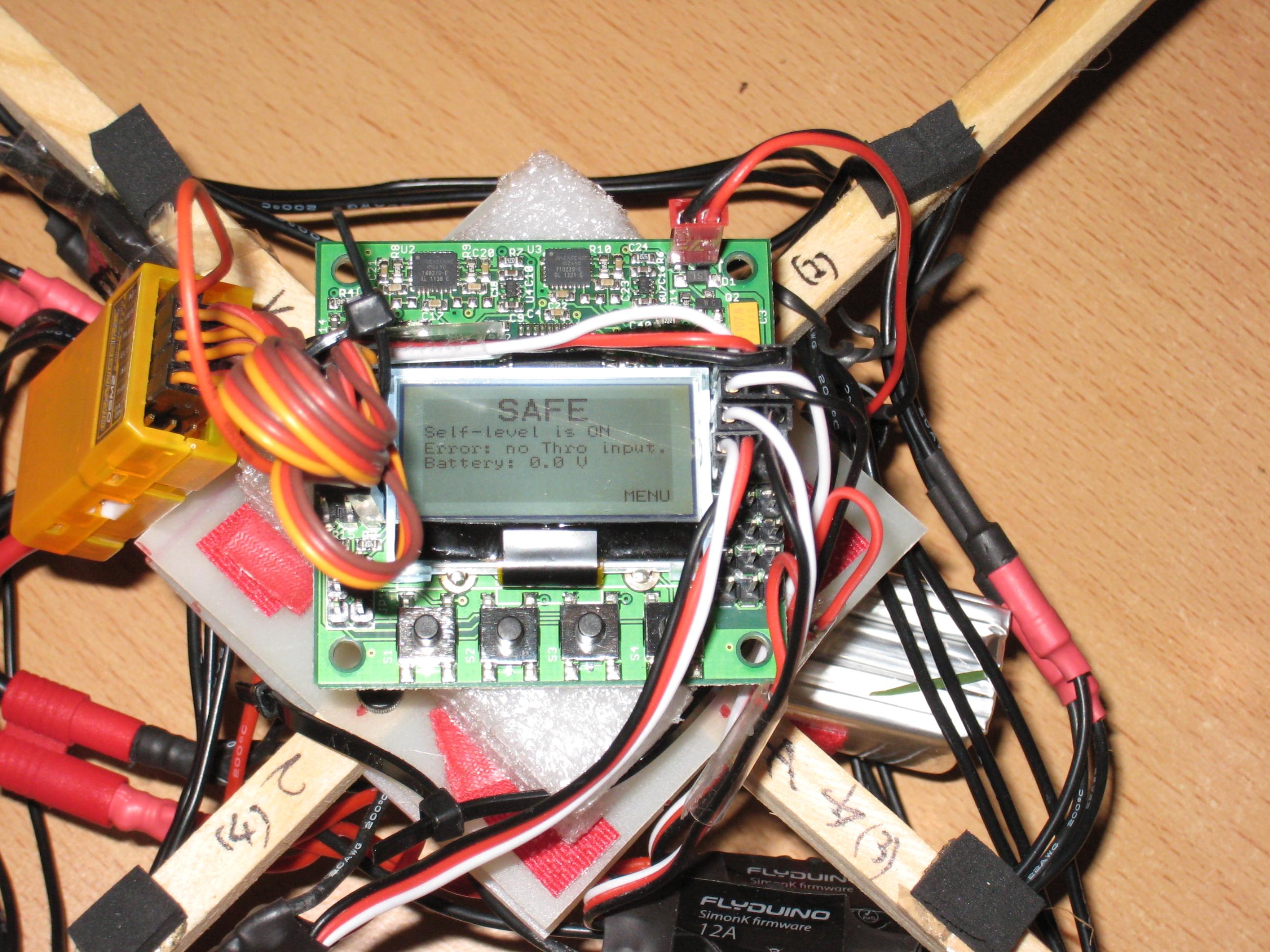
Bisher nicht umgeflasht auf GPS und I-Sensor (aber die Prg-Pins sind schon mal dran!). Der Sensor kommt trotzdem dran – an den V-input. Dann kann ich etwa abschätzen, wie lange ich fliegen kann. Und ich sehe auch die Spannung. Und einen Timer, der hochzählt. Morgen gehts los!!!
So, da ich mit dem Copter nicht klarkam – jetzt muss der Easystar dran glauben. Mittlerweile ist auch mein Monitor da (GLS fand erst die Adresse nicht …) – VGA-Auflösung, 8″, 1,1kg schwer, sehr hell, braucht 1,5A.



Und er musste in die Kiste!
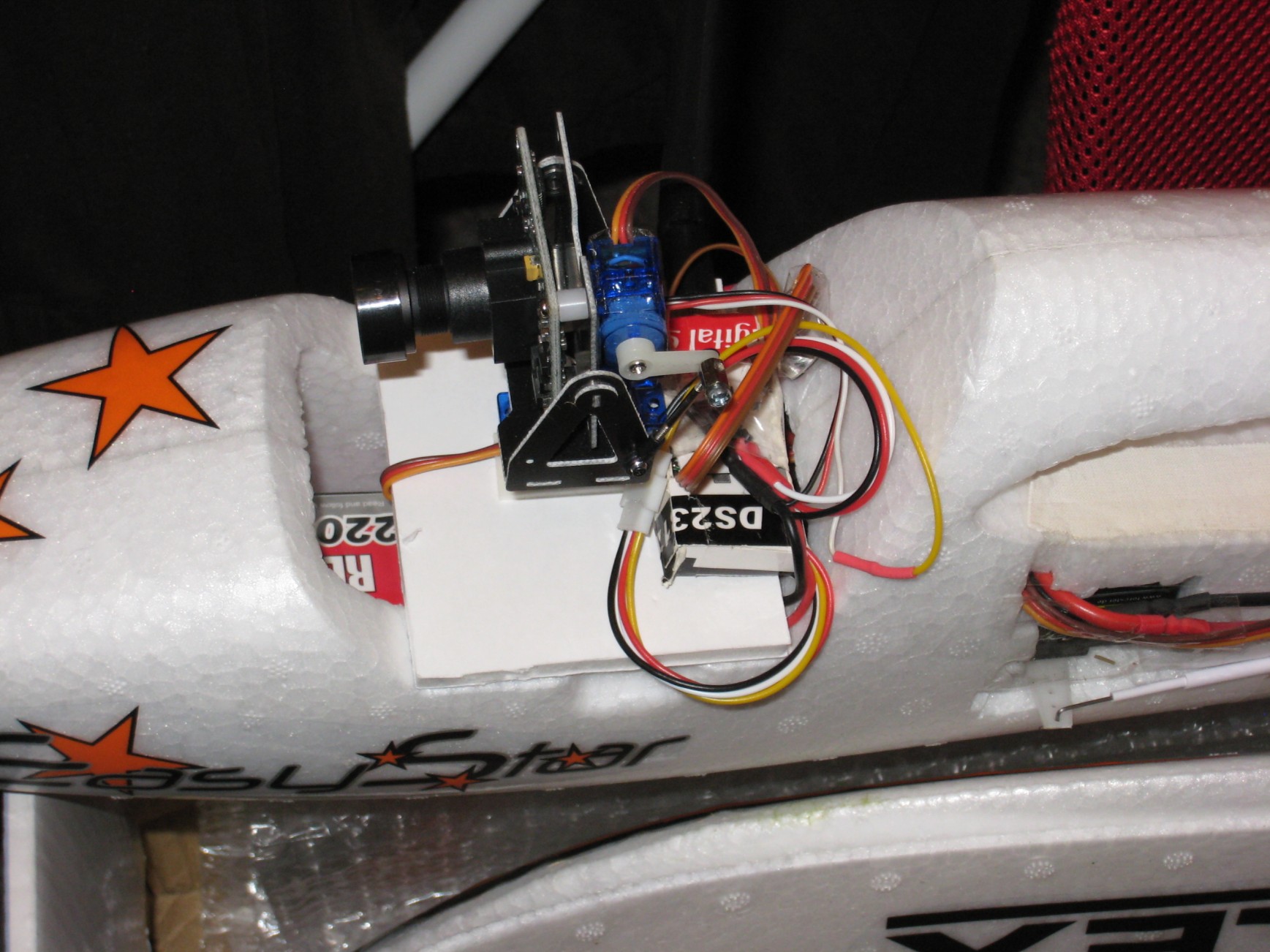
Am Easystar ist jetzt die 35MHz-Funke vom Condor dran. Die FPV-Platte ist aus einer KAPA-Platte geschnitten und mit original Velcro-Klebeellipsen befestigt – bombenfest. Die Flügelsteckung ist jetzt auch mit diesem Klettverschluss gesichert. Kann losgehen!