Da steht sie! *grins*
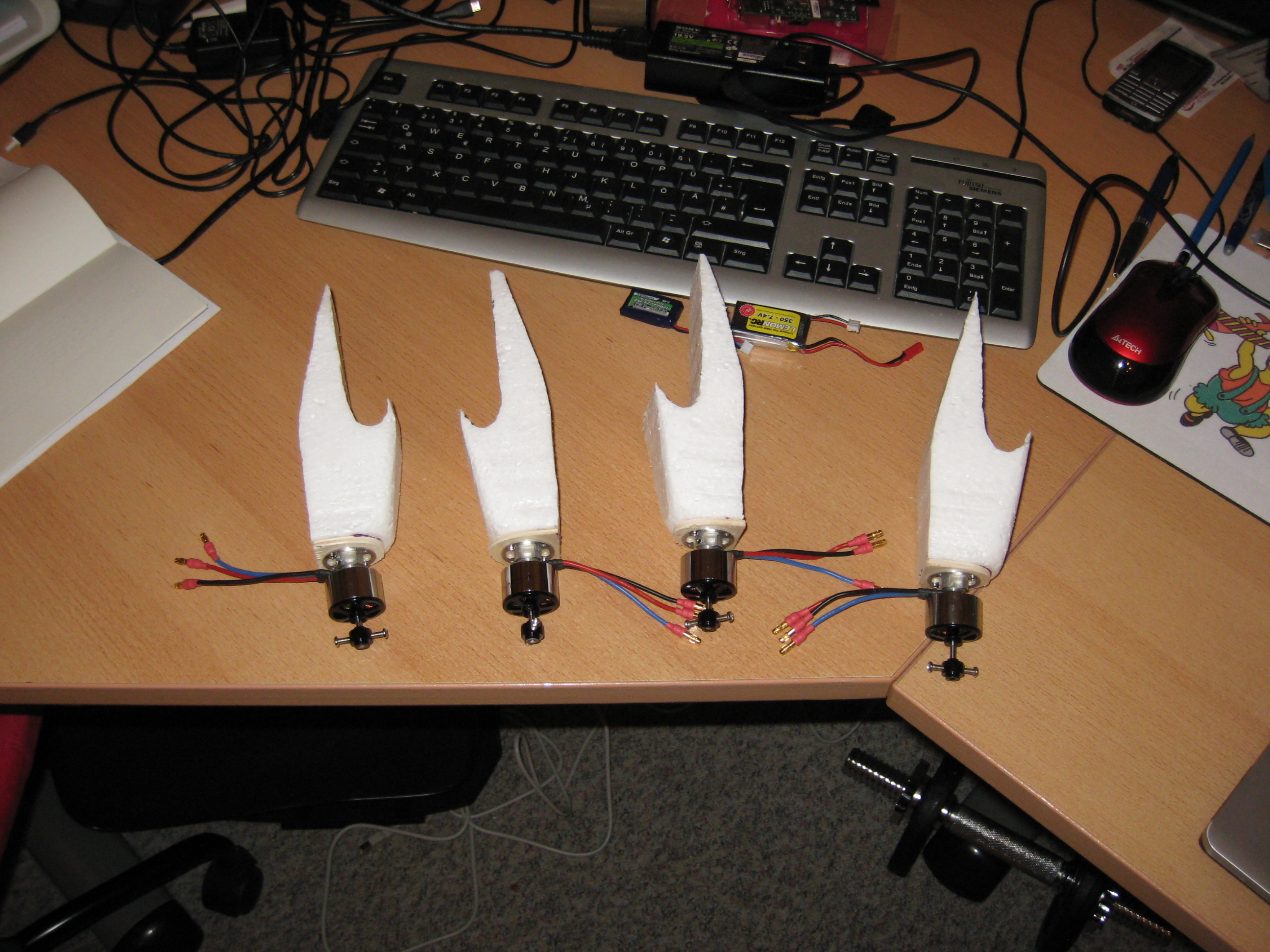
Fast fertig! Das Höhenleitwerk ist aus doppeltem Depron mit Kohle-Flachprofil (sehr robust, aber auch schwer), das Seitenruder aus Styropor mit Kiefernholm 3×10. Die Motorträger sind mit dem 90°-Drahtschneider freihand „gesägt“ und dupliziert (die für die schiefen Flächenabschnitte durch Unterlegen schräg durchgeschoben). Es fehlen noch: Flächen-Holme, Fahrwerk, Flächenauflage, Anlenkungen, die Nase fein schnitzen und mit Magneten schließen lassen, die ganze Elektronik. Und Alex, was sagste dazu?
— Update Sonntag —
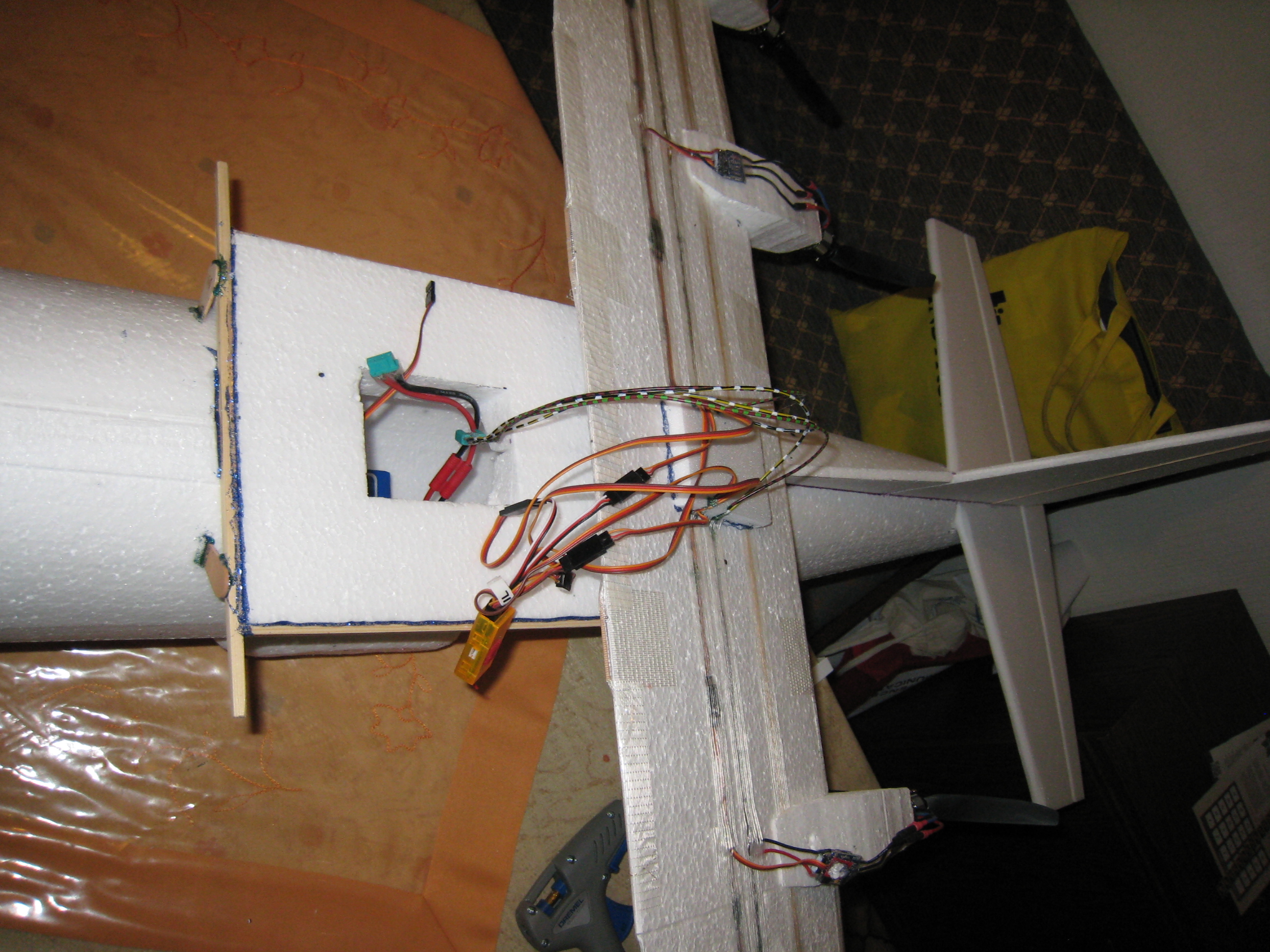
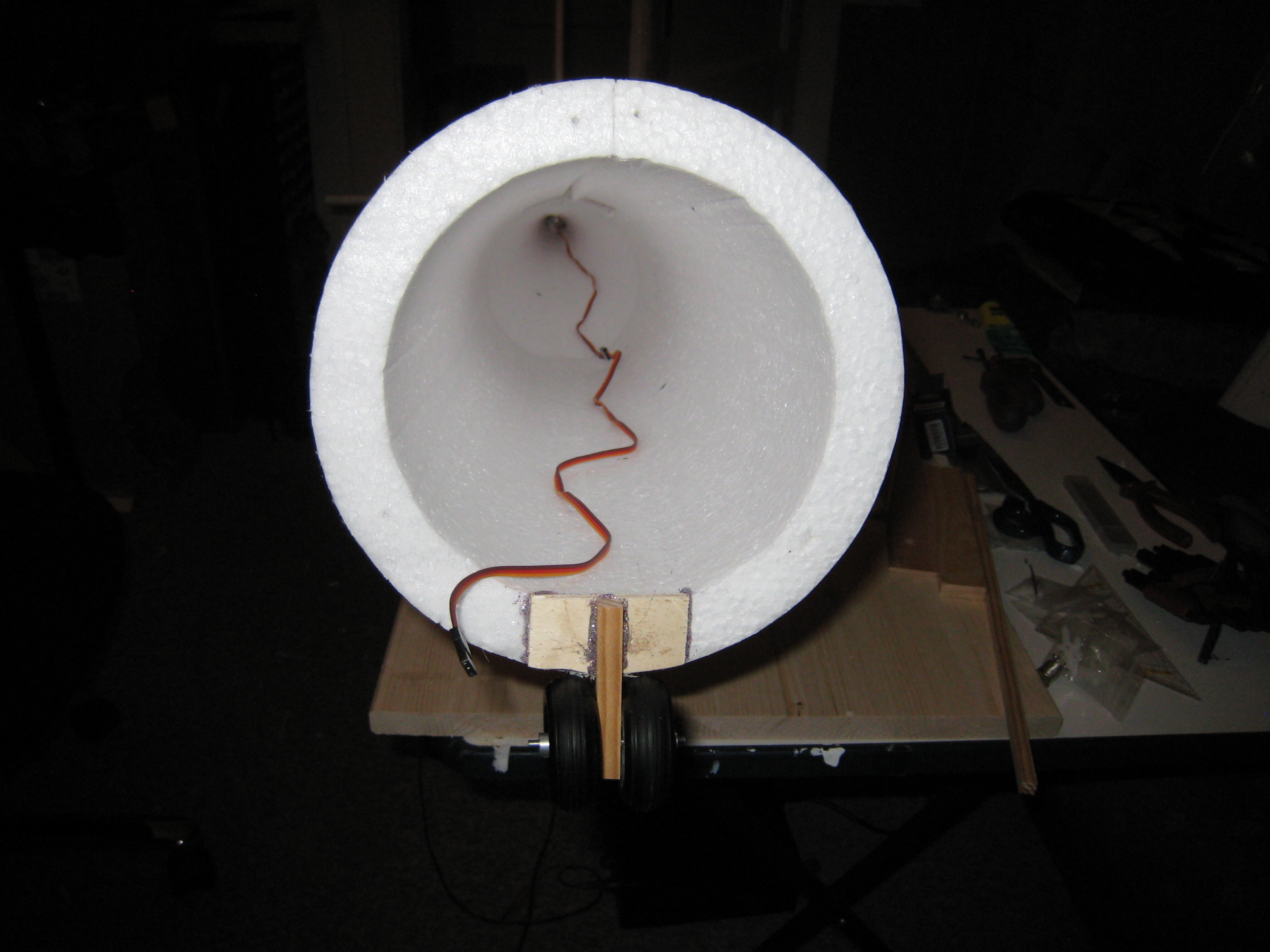
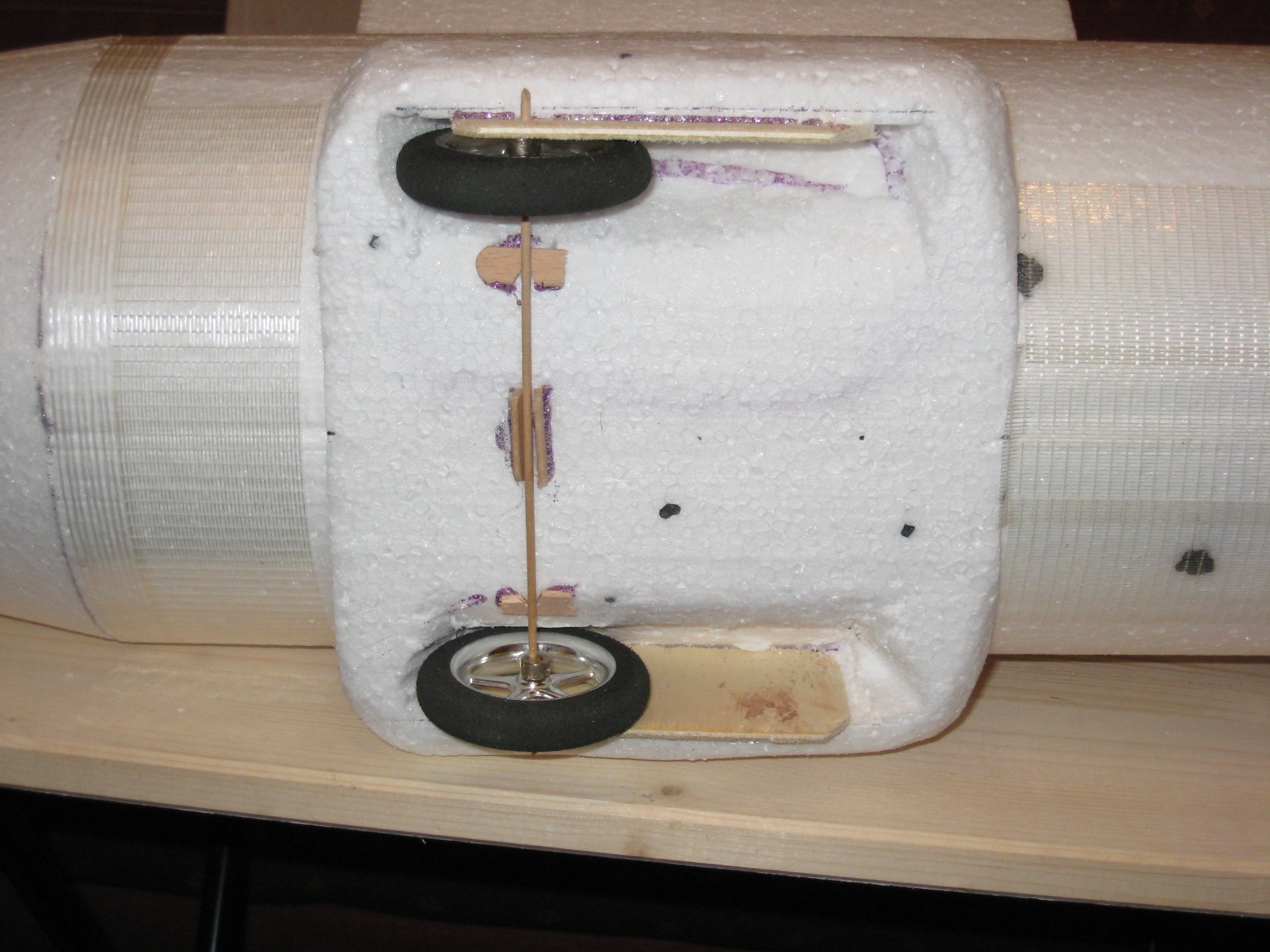
Heute habe ich den Rumpf mit Fahrwerk vorne und Mitte und Flächenauflage (und Loch oben) versehen, das Kabel fürs Höhenruder eingelegt, das Hinterteil angeklebt, den oberen Holm eingeharzt (mit der Fräse klappt das Aushöhlen am besten – aber das mache ich im Keller!). Das Fahrwerk hat mangels Räder nur zwei hinten (kann man aber nachrüsten :-). Die Motoren habe ich auch schon festgeschraubt und die Servoaussparungen freigeschnitten. Es fehlen jetzt noch: Stäbe für die Flächengummis, Führung/Zentrierung für die Fläche, die Nase, unterer Holm in der Fläche, Servos, Ruderhörner, Anlenkungen, Empfänger, Regler, Verkabelungen der Fläche, Akkubrett
— Gewicht —
Kompletter Rumpf mit (ungeformter) Nase und Fahrwerk ~400g
Fläche mit Holmen 164g
Motoreinheit plus ganzer Motorträger 82g (x4 = 328g)
4s 3200 Akku 332g
Servos je 15g mit Anlenkung (x3 = 45g)
Alle Servo-Verlängerungskabel 40g
Fehlt noch Akkubrett, Flächengummis, Motorkabel, Empfänger (10g)
Soweit: 1309g
Dazu kommen bestimmt noch weitere 50-100g Kleber und Tape 🙂