…vorbei – Copter kaputt fliegen kann ich:


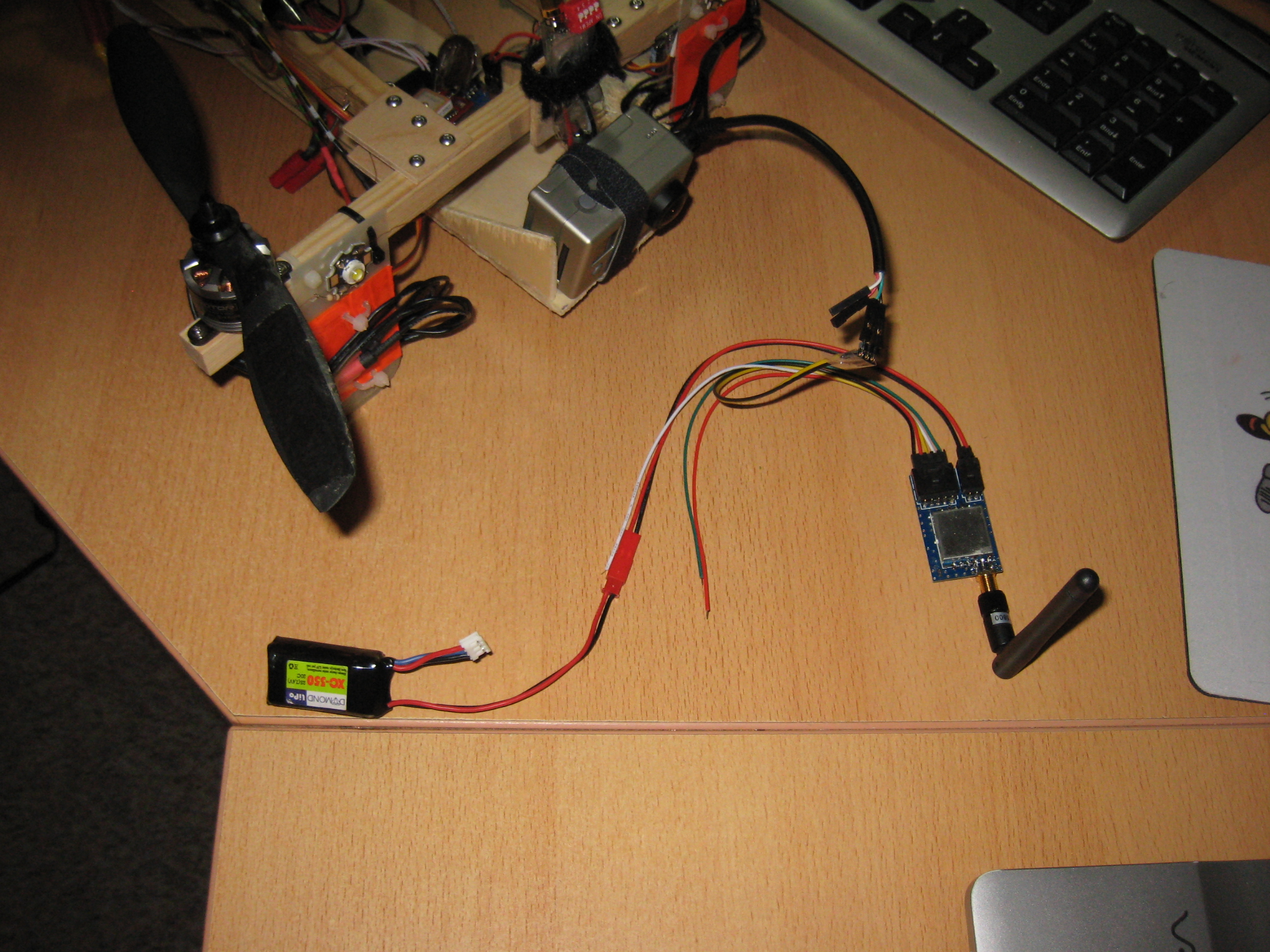
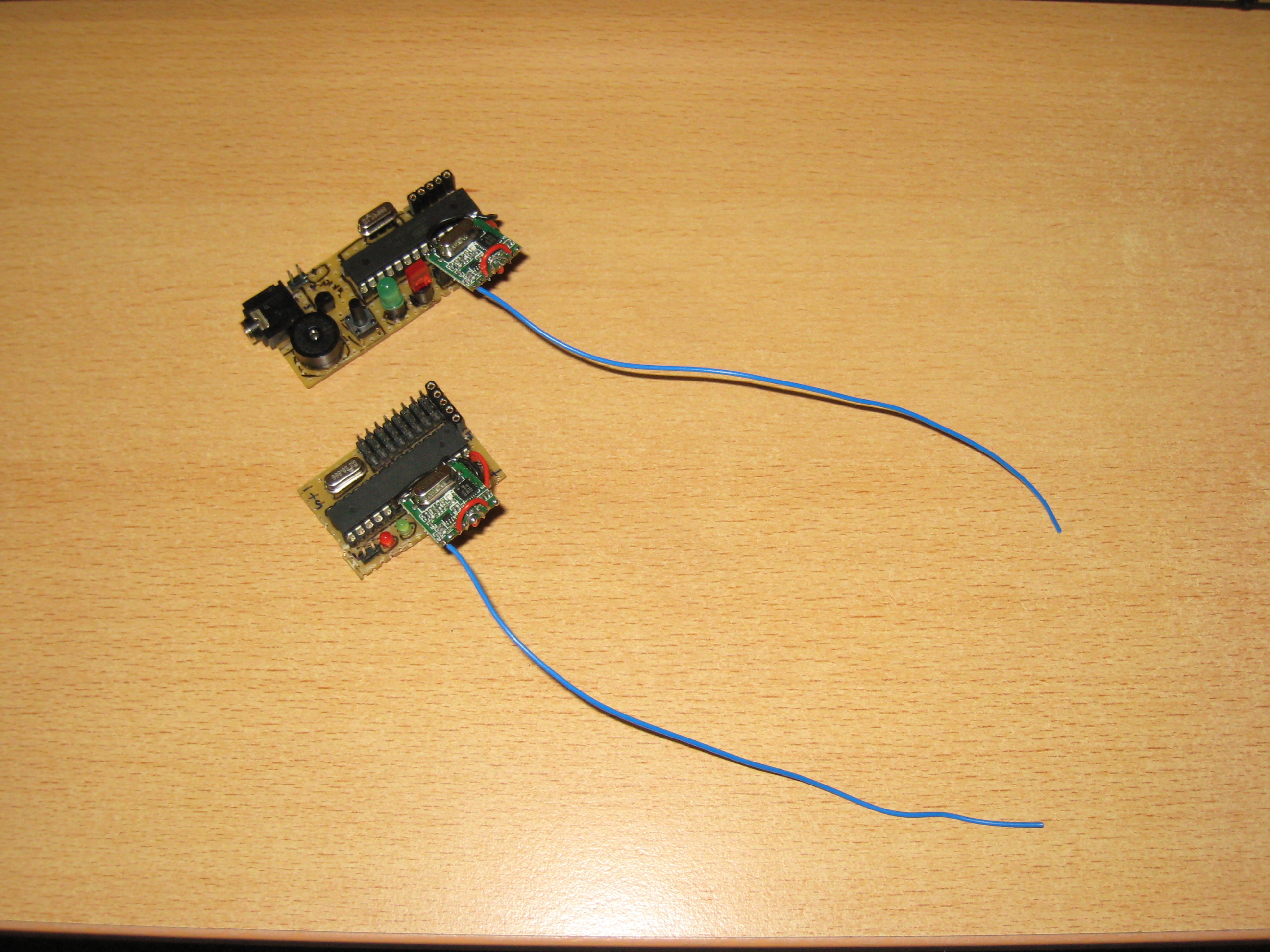
Das LRS ist doch nicht so LRS, zumindest nicht mit den Draht“antennen“ 15,5cm und 9600baud… und störanfällig gegen den HK 2,4 GHz Videolink. Dieser wiederum ist sehr störanfällig gegen die Motoren… also in dieser Kombi unbrauchbar 🙁
Das normale 5,8 GHz Fliegen war wie immer, ich kam nicht mal viel über 300m raus.
Der Boden war nass, kräftiger Wind aus Westen dazu und entsprechend kalt.
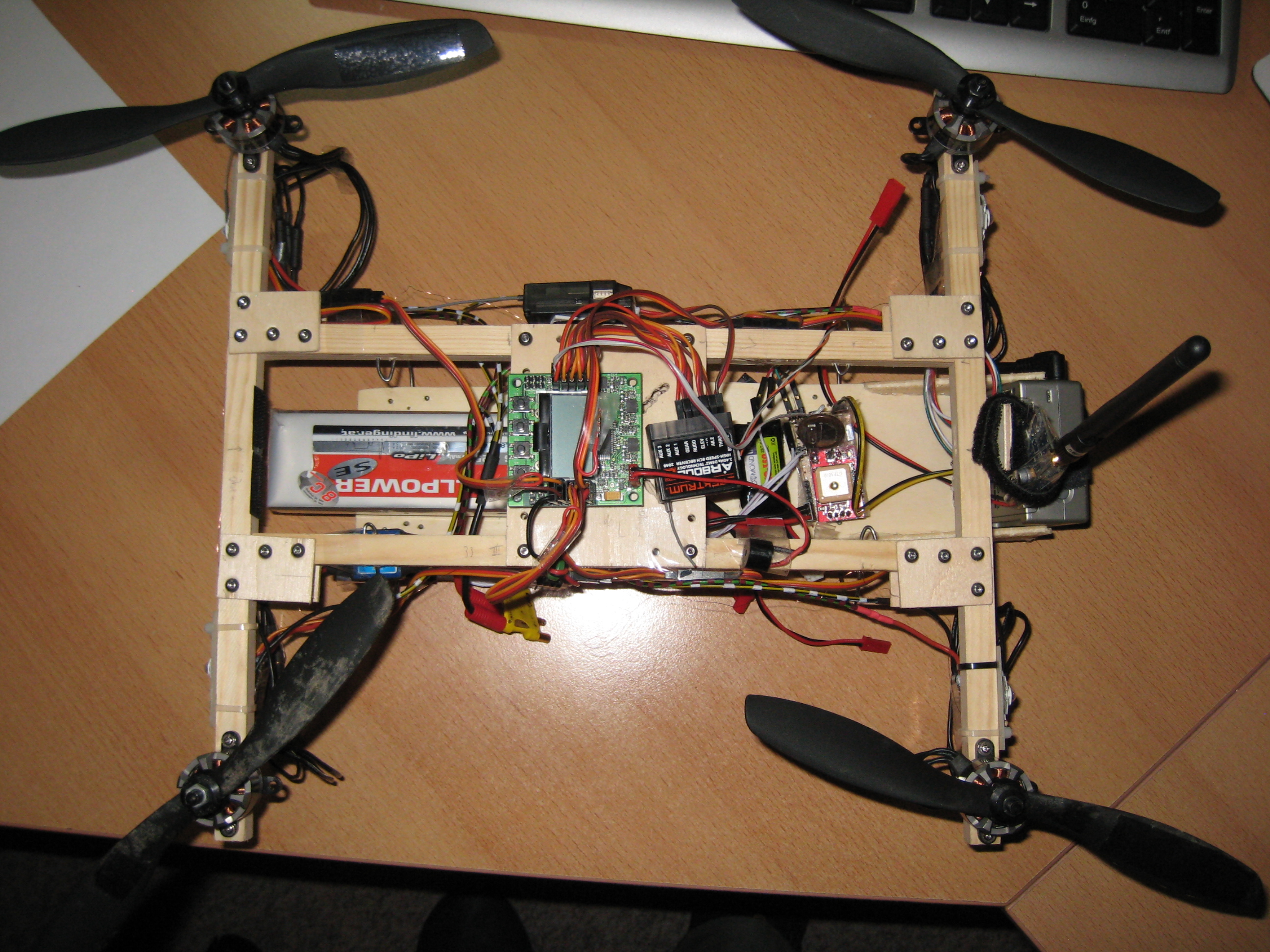
Zu guter Letzt hing sich die GoPro ständig weg und nahm das Absturzvideo nicht auf.
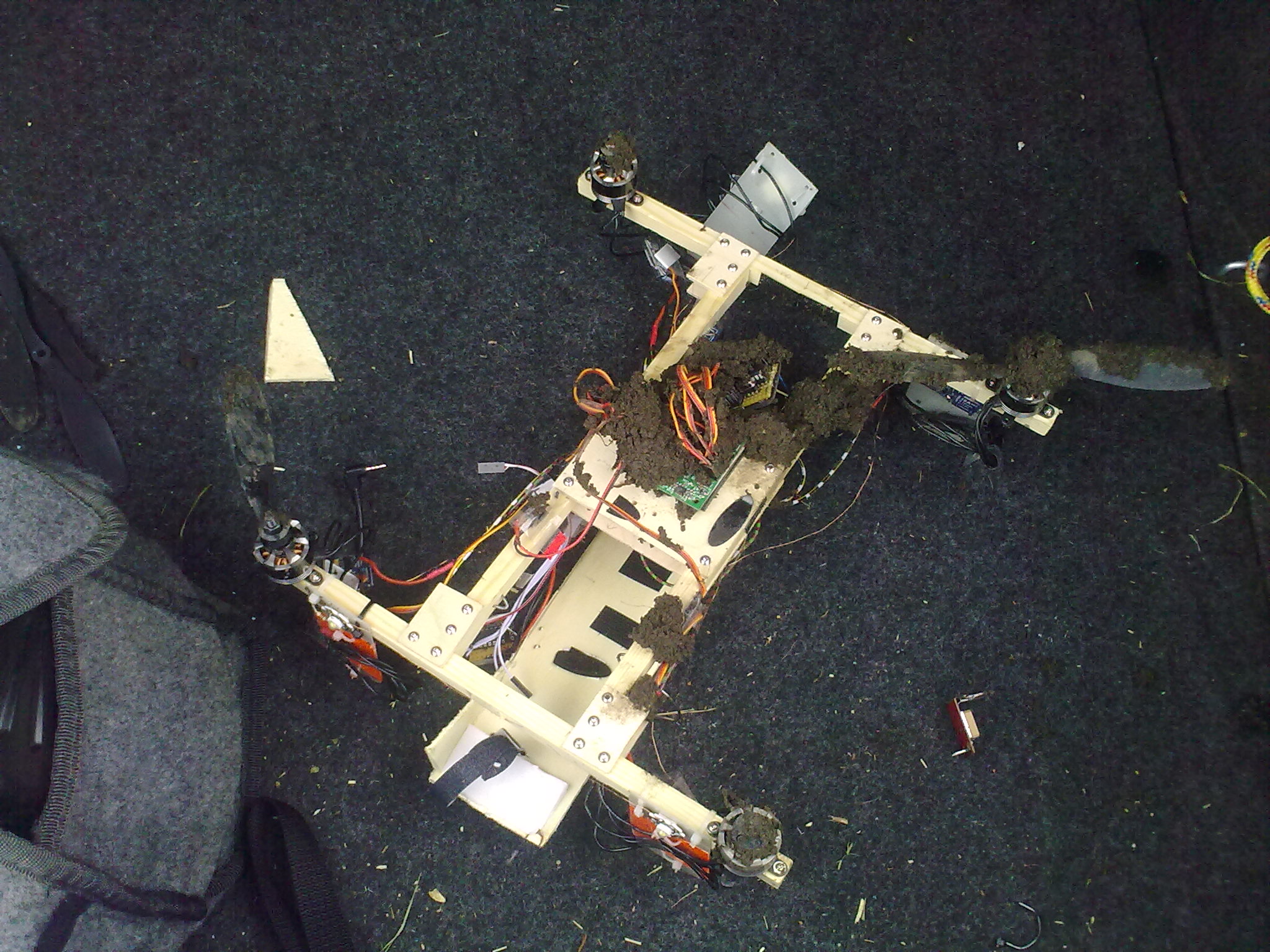
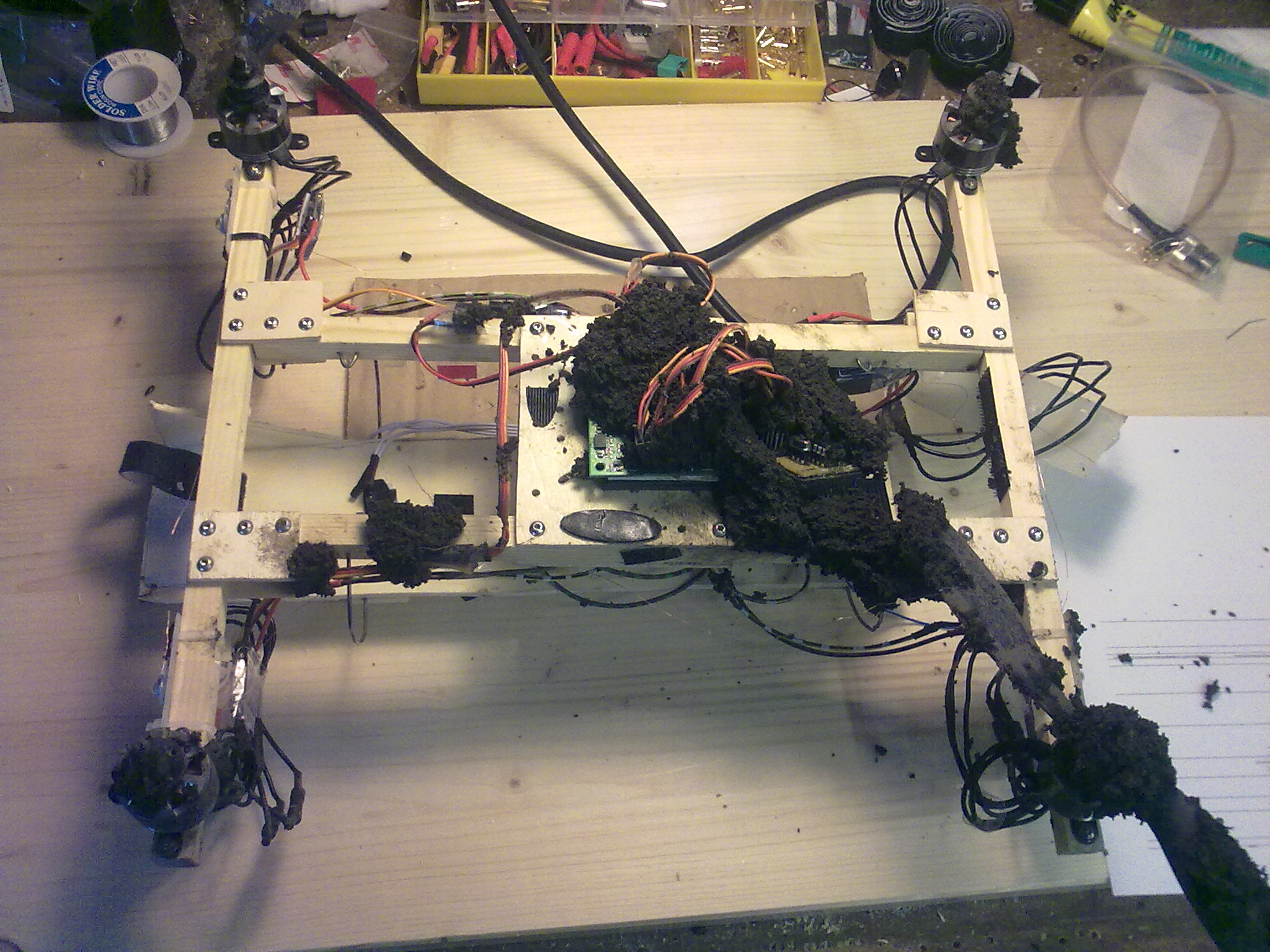
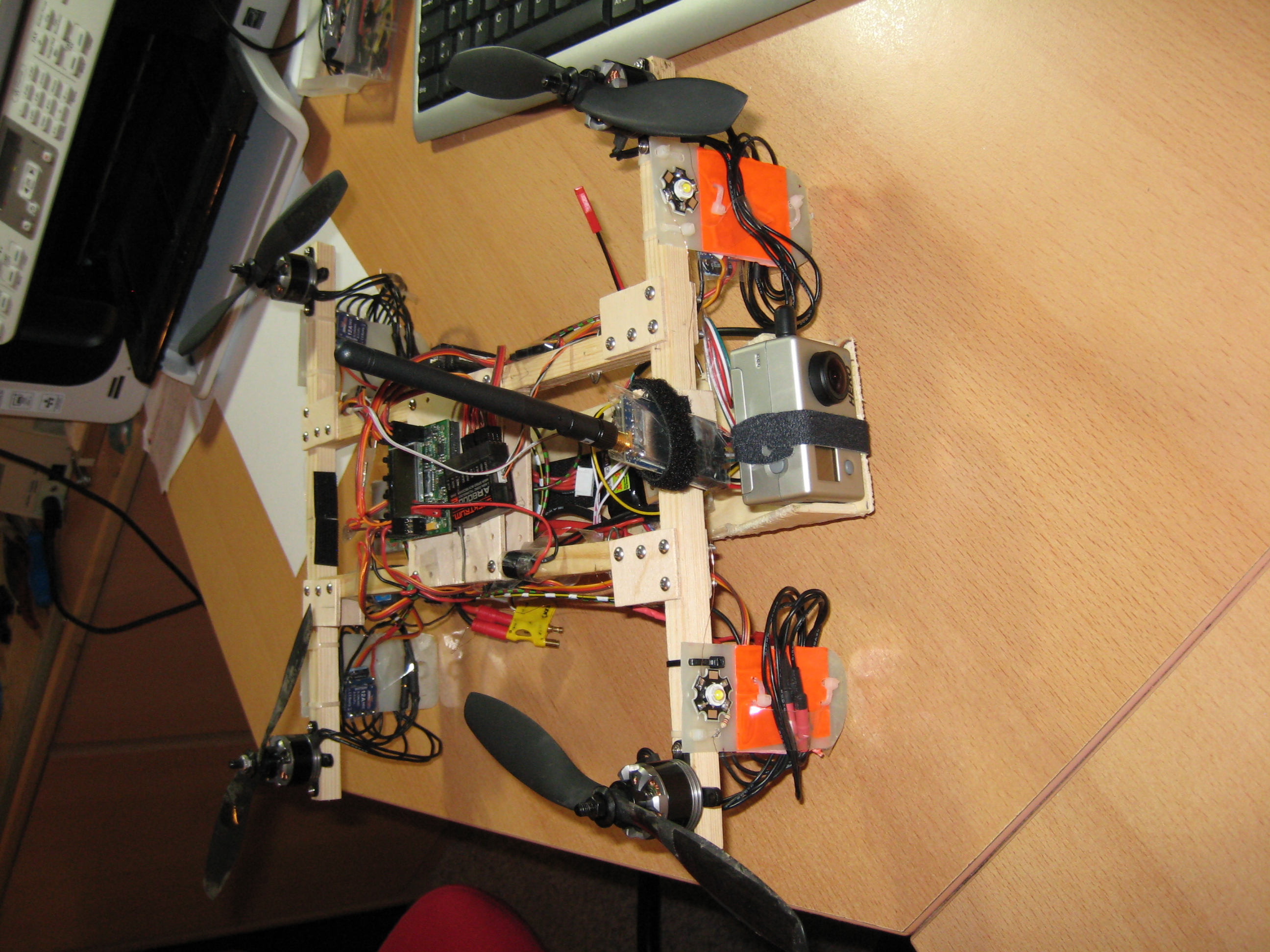
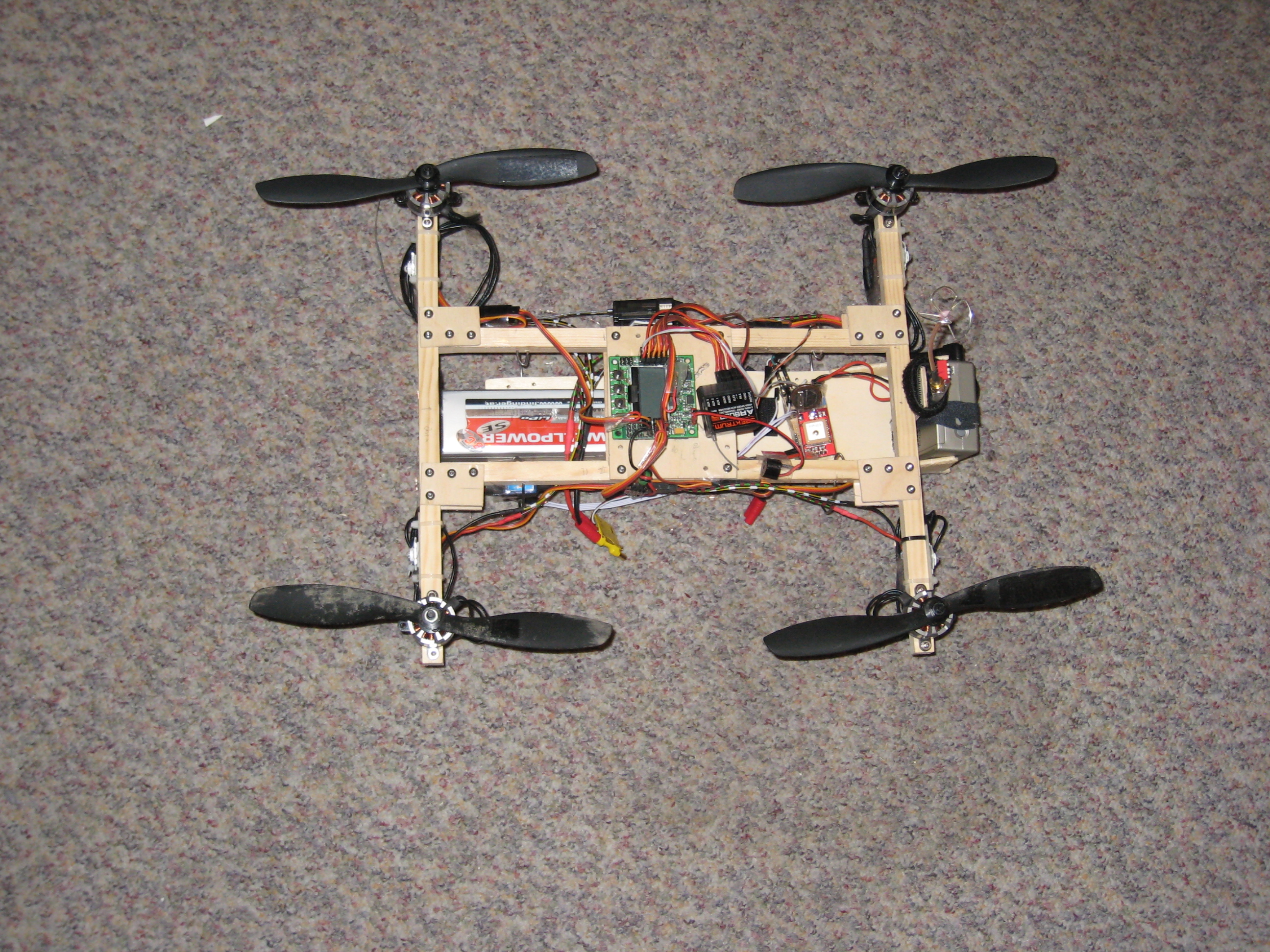
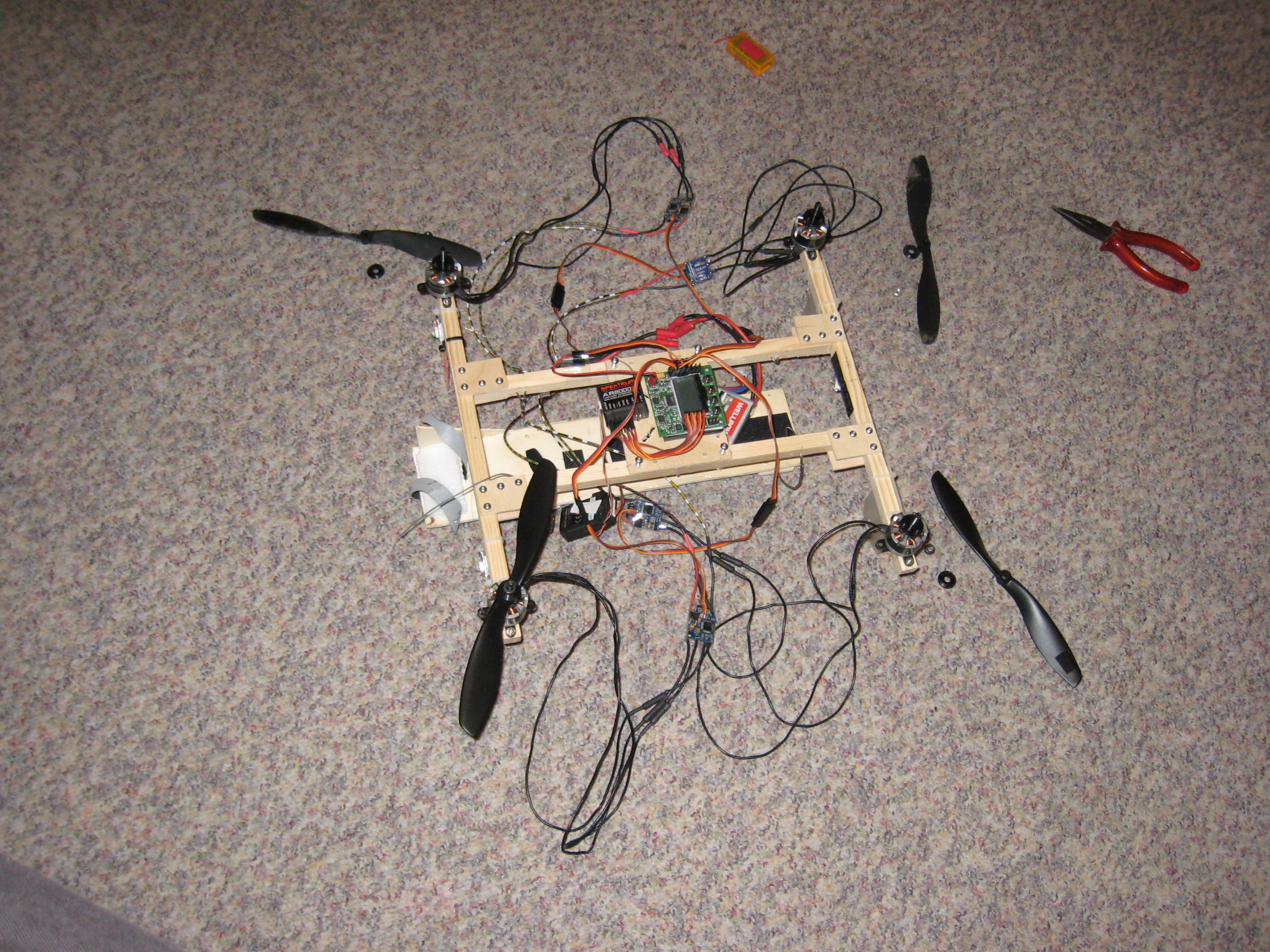
Aber jetzt mal zum Höhepunkt am Samstag: Der Copter flog gerade zurück (mit meinem normalen 5,8 GHz System), 200m entfernt, als die Funkverbindung des OpenLRS aussetzte. Der Copter fiel nicht runter, nein, das OpenLRS hält die letzten Positionen für 1,2s und durch meine sporadisch ankommenden Steuerkorrekturen kippte er nach rechts und beschleunigte kräftig über den benachbarten Acker. Durch den nächsten Befehl machte er dann einen Flip und krachte kopfüber in den Matsch. Ja und da musste ich nun hin. Ich sank immer wieder ein, ich hatte an jedem Fuß 5kg Matsch und musste aufpassen, dass ich die Schuhe nicht verlor. Entsprechend lange dauerte die Bergung und es bot sich mir das „gewohnte“ Bild der Trauer. Ich sammelte also Akku, Propeller, GPS, Funksender, Copter und Kleinteile ein und stapfte den Acker zurück. Zum Glück hat der weiche Matsch größere Schäden verhindert. Dafür klebte er dick überall dran.
So, aber das ist ja nicht schlimm:
Jetzt fliegt er wieder. Im Endeffekt hat mich das nur 2 Propeller gekostet.