Styro+Drahtschneider:



Styro+Drahtschneider:
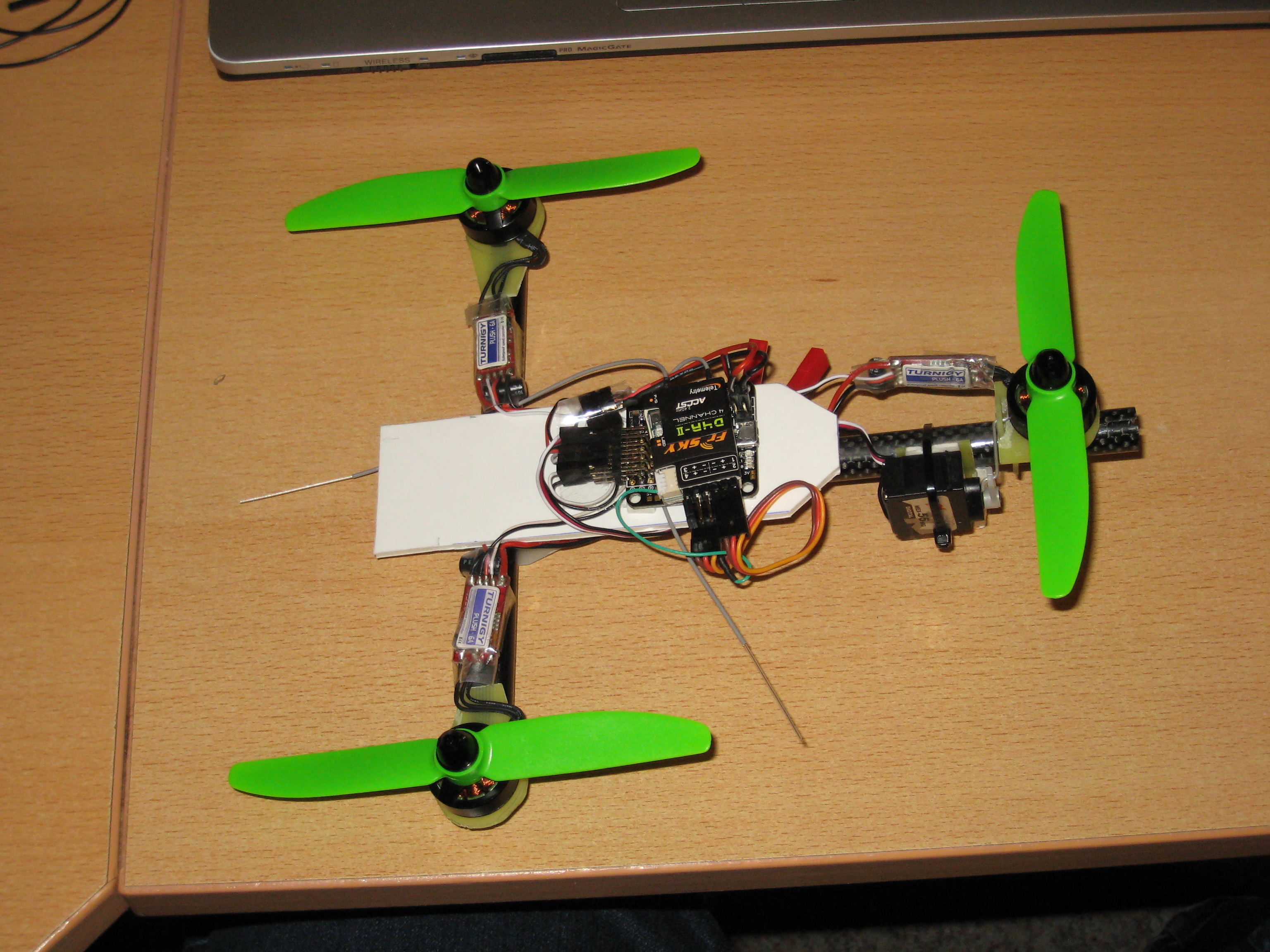

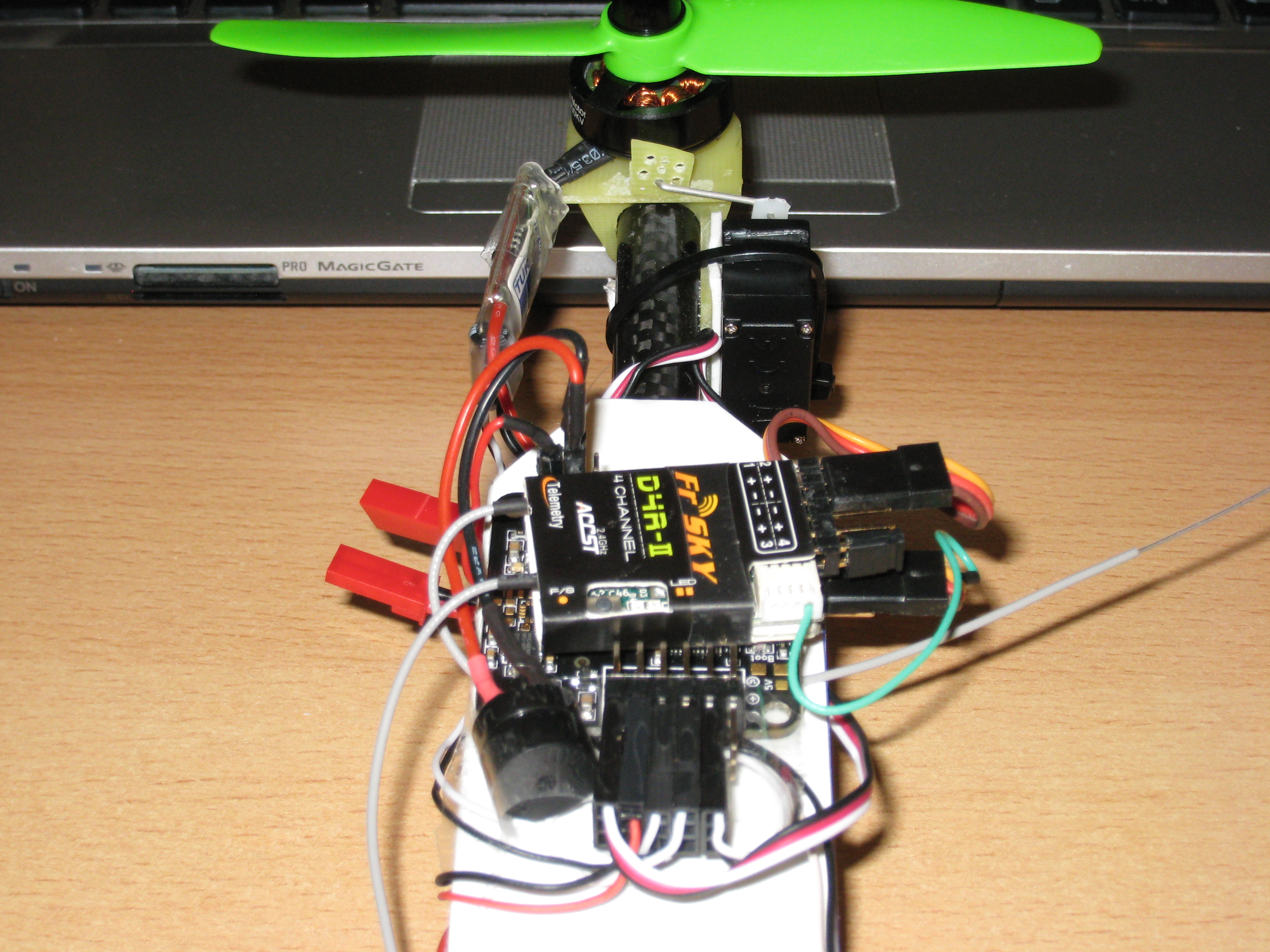
Klein, süß – und leicht.
135g ohne Akku (Akku 50-90g). Der Frame allein wiegt 25g. Das dicke Servo 12g. Motoren, ESCs und AcroNaze32 85g mit Kabeln. Bleiben noch 13g für RX, Beeper, diverse Tesa und Doppelklebebänder, Kabelbinder und den Heckstandfuß. Ich habe flach gebaut – und vergessen, dass meine Tris alle mit Servo wackeln und so der Rotorkreis in den Boden kommt…
Mein Yaw-Mechanismus nutzt das Heckrohr als Gelenk! Hat leider auch etwas Spiel.
Und fliegen kann er auch ganz schön.
Settings: Looptime 2000, OneShot125, Failsafe 1200, Softserial Telemetrie …
Erste PIDs: Roll+Pitch P/I/D = 5.0/0.030/20; Yaw = 5.5/0.020/0; TPA = 0.05; Rates 0.20/0.20; RC Rate = 1.00; Expo 50; Throttle mid = 0.44+Expo 10
Heute war es windstill, sonnig und kalt (-1°C). Also fuhr ich raus auf den Flugacker.
Dort flog ich den Racetri, 2 Akkus. GPS klappt eher leidlich, fängt an sich aufzuschwingen und kurvt um den Punkt immer größer rum. Der Kompass muss wohl auch noch mal kalibriert werden. Nach Hause fliegt er ungefähr, Höhe hält er gut. Damit kann ich erstmal leben.
FPV mit Open LRS ist auch nix – der RSSI fällt schon nach halber Wiese unter 50 bis auf 40. Steuerbar blieb der Copter zum Glück (sonst hätte ich gleich mal erlebt, wie er automatisch heimkehrt). Da ist einfach zuviel UHF-Dreck an Board. Die Straßenmessung hätte mir ja 3km versprochen…
Das Bild der PZ0420 mini ist gut. Von der Auflösung keine GoPro, aber immer Boden und Himmel gut sichtbar.
Die Steuerbarkeit ist auch gut. Yaw ist fast noch zuviel P.
Der Wirkungsgrad des Tri ist bescheiden. Ich kann 5-6 Minuten an den 800mAh Akkus fliegen und er zieht 5-6A im Schweben. Die Performance ist gut. Bevor man sich’s versieht, ist man auf 80m. Allerdings werden die Motoren schon beim Schweben gut warm. Irgendwann steht da ein Umbau an. Aber er ist so schön leise. Hm. Vielleicht lasse ich ihn auch.
Mittlerweile habe ich die neueste Cleanflight-FW drauf und P etwas runter. Für GPS habe ich jetzt die Werte aus dem KAPA-Kopter kopiert.
Die Aufnahme der Bodenstation/FPV-Brille hat beim RaceTri nicht geklappt. Da war wohl Strom weg zu viel bei -1°C. Dafür bekam ich den RaceQuad.
RaceQuad: Auf Sicht, dann FPV. Da ich ja weiß, dass OpenLRS nicht weit kommt, blieb ich in der vorderen Hälfte. Dieser Quad hat kein GPS und lässt sich im Ernstfall einfach waagerecht fallen.
Der alte 1200 Dymond-Akku ist müde. Der piept schon beim Schweben. Der neue 1250 hat ordentlich Dampf. Vibrationen macht der Copter auch einige, sieht man auf dem 808-Video. Im FPV sieht man das nicht. Die Kamera macht ganz ordentliches Bild, man sieht immer den Boden. Allerdings war dieser auch partiell schneebedeckt.
Dann flog ich noch den CP1, der fliegt dagegen fast ewig. Und hat Power satt. Nur die Agilität um die Achsen ist ausgebremst, der macht zu viel Expo und dreht zu langsam.
Als ich den WarpQuad auspackte und starten wollte, kam unser Freund, der Jagdpächter, erzählte von seinen 12 Rehen in der Wiese, die ich mal wieder aufgeschreckt hätte und ich packte für heute ein. Ich war eh schon über eine Stunde da und mir froren langsam die Zehen ein.

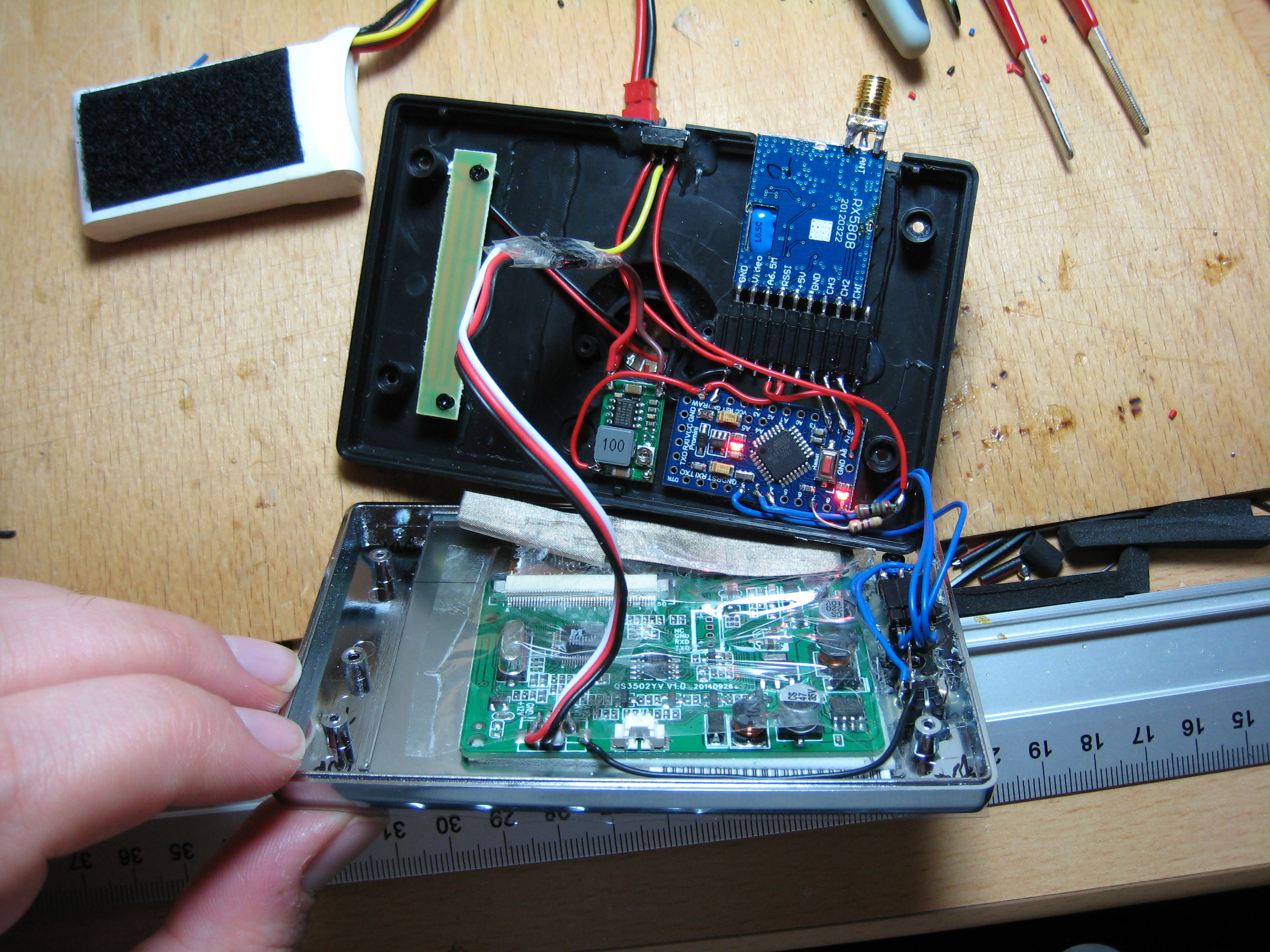
Und so kommt zusammen, was ich in den letzten Monaten alles bestellt habe:
Dazu noch ein paar Kabel, ein Umschalter, 3 Taster und Stecker/Buchsenleisten. Die 3 Taster steuern den Betrieb: Up, Mode, Down. Im Mode kann man aus dem Menu wählen:
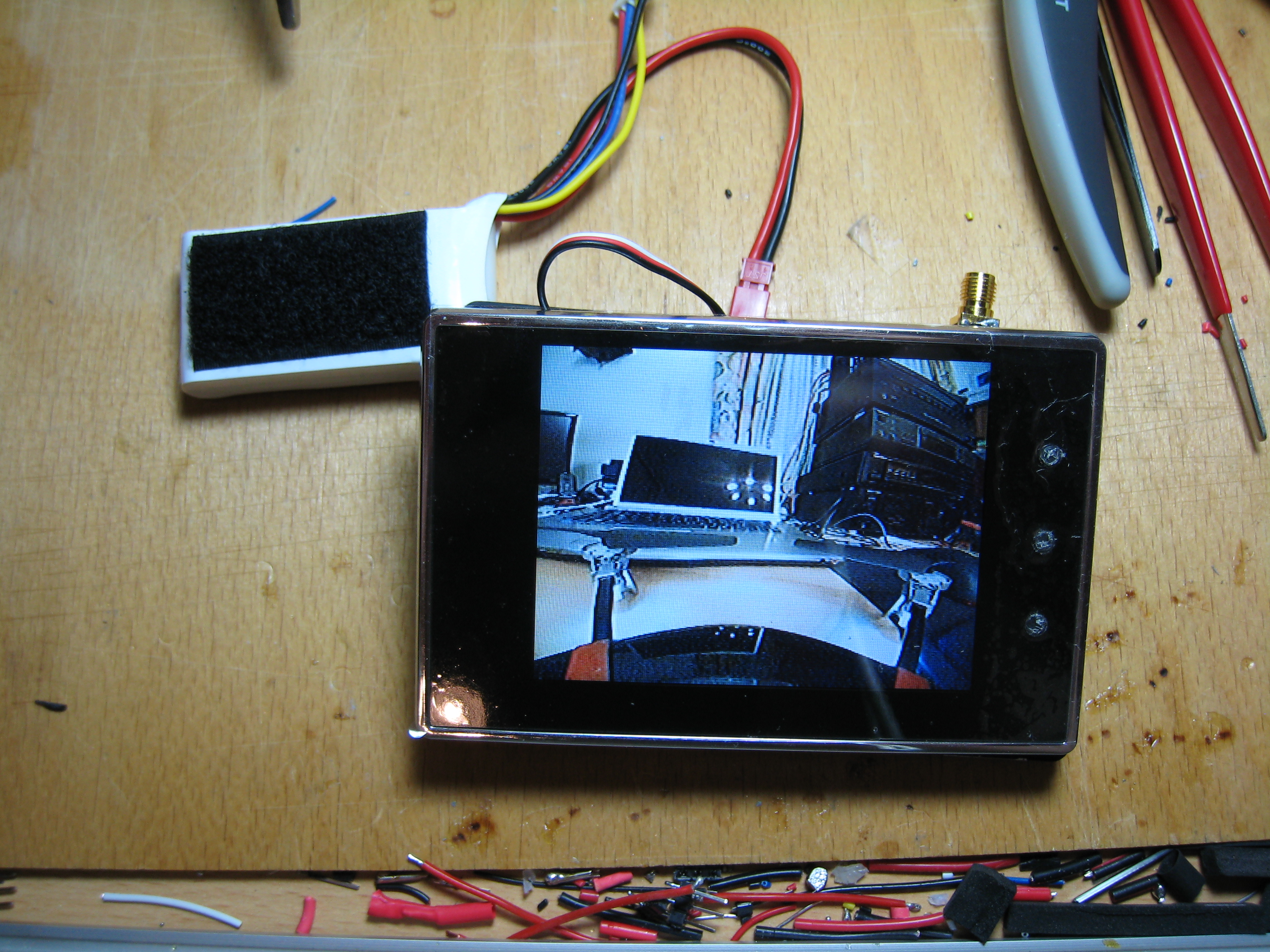
Leider geht das Gehäuse nicht ganz zu, weil die Platine im Bildschirm dicke Spulen hat…
Noch ein Klett für den 3S-Akku hinten dran, fertig.
Stromaufnahme: ca. 300mA
Sender ca. 0,2 mW, Wetter: klar und trocken, ca. 1°C
Empfänger: Boscam RC305 alt, Boscam RC305neu, DIY RX5808 mit SPI
Ergebnis: Alle drei kamen etwa bis zur 2. Kreuzung (250m, dann knickt die Straße), aber auf dem Weg dahin gibt es Unterschiede:
Der neue RC305 ist Mist, der hat ständig Flackern und Bildausfälle, ab 200m kann man das Bild nur noch erahnen.
Der alte RC305 liefert ab der ersten Kreuzung (130m) konstant verrauschtes Bild ohne nennenswerte Ausfälle, die Farbe ist auch weg.
Der DIY ist dazwischen, er kommt mit gut verrauschten Bild zur 2. Kreuzung, aber hat mehr Störungen als der alte RC305. Kann auch sein, dass er noch ein extra Metallgehäuse zur Abschirmung braucht und Störungen einfängt. Es kann auch gut sein, dass es fertigungsbedingte Unterschiede der Module gibt.