Buzzer-Einbau
An den unteren Lötpads neben dem Pfeil gehört der Buzzer. Den Mini-Buzzer gibt es z.B. hier.
/\ oB- oB+

Ich habe den Crazybee F4 Pro V2.1 (ohne integrierten Rx).

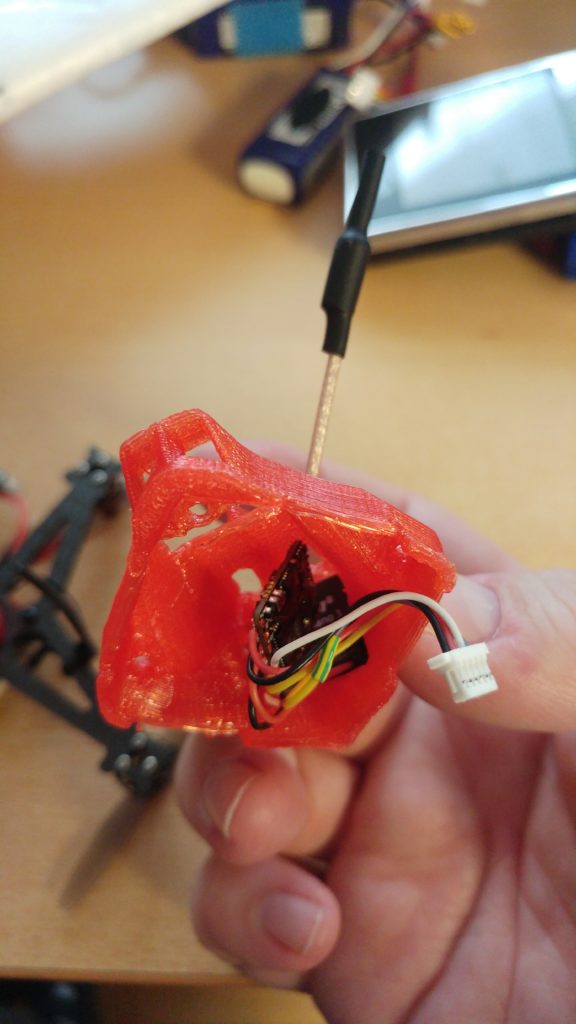
Runcam nano 3 und TBS unify nano 32
Die alte Kamera wiegt 3,4g. Das Set aus nano3 und Unify 3,5g. Die Bildqualität der nano3 ist etwas besser. Und der Unify hoffentlich auch. Den nötigen Micro-5pin-Stecker habe ich aus einem alten 8er zurecht gezwickt. So blieb die alte Kamera heile.
Die Pins sind:
GND(black) 5V(red) SA(green) Vcam(yellow) Vtx(blue)
Betaflight V4.1.3
Das neue Betaflight benötigt eine VTX-Table, bevor man den VTX konfigurieren darf! Siehe auch hier. Für den Unify nano32:
vtxtable bands 5 vtxtable channels 8 vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725 vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866 vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 5645 5885 5905 5925 5945 vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880 vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917 vtxtable powerlevels 3 vtxtable powervalues 14 20 26 vtxtable powerlabels 25 100 400
Für die originale Kamera bietet Happy-Model auch eine VTX-Konfiguration an. Da stimmt der Service!
Happy-Model hat die Motoren nicht „Multiwii-konform“. Sie sind links-rechts getauscht (danke Happy-Model). Hier die Infoseite. Eigentlich muss man nur das ins CLI eingeben:
resource MOTOR 1 B07 resource MOTOR 2 B08 resource MOTOR 3 B10 resource MOTOR 4 B06 resource PWM 1 D07 resource PWM 3 D11 resource PWM 5 D10 resource PWM 6 A11 resource PWM 7 F08
Hier mein voller Diff:
# diff # version # Betaflight / STM32F411 (S411) 4.1.3 Jan 16 2020 / 11:34:23 (543a5e1ba) MSP API: 1.42 # manufacturer_id: HAMO board_name: CRAZYBEEF4DX custom defaults: YES # start the command batch batch start board_name CRAZYBEEF4DX manufacturer_id HAMO # name: Sailfly X # resources resource MOTOR 1 B07 resource MOTOR 2 B08 resource MOTOR 3 B10 resource MOTOR 4 B06 resource PWM 1 D07 resource PWM 3 D11 resource PWM 5 D10 resource PWM 6 A11 resource PWM 7 F08 # beeper beeper -ON_USB # serial serial 0 64 115200 57600 0 115200 serial 1 2048 115200 57600 0 115200 # aux aux 0 0 0 1300 2100 0 0 aux 1 1 1 1700 2100 0 0 aux 2 13 2 1300 1700 0 0 aux 3 35 2 1700 2100 0 0 # vtxtable vtxtable bands 5 vtxtable channels 8 vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725 vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866 vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 5645 5885 5905 5925 5945 vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880 vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917 vtxtable powerlevels 3 vtxtable powervalues 14 20 26 vtxtable powerlabels 25 100 400 # master #set acc_calibration = -75,175,-66 set rssi_channel = 16 set fpv_mix_degrees = 40 set serialrx_provider = SBUS set dshot_idle_value = 500 set motor_poles = 12 set vbat_min_cell_voltage = 300 set vbat_warning_cell_voltage = 310 set ibata_scale = 1175 set small_angle = 180 set pid_process_denom = 1 set osd_warn_esc_fail = OFF set osd_vbat_pos = 2401 set osd_rssi_pos = 2361 set osd_tim_1_pos = 54 set osd_tim_2_pos = 2422 set osd_flymode_pos = 408 set osd_g_force_pos = 65 set osd_throttle_pos = 2392 set osd_current_pos = 2369 set osd_mah_drawn_pos = 2412 set osd_craft_name_pos = 2442 set osd_warnings_pos = 329 set osd_disarmed_pos = 426 set vtx_power = 1 set vtx_low_power_disarm = UNTIL_FIRST_ARM set vtx_freq = 5860 set gyro_1_sensor_align = CW90FLIP set gyro_1_align_pitch = 1800 set gyro_1_align_yaw = 900 set name = Sailfly X profile 0 # profile 0 set dterm_lowpass2_type = BIQUAD set vbat_pid_gain = ON set feedforward_transition = 30 set iterm_relax_type = GYRO set iterm_relax_cutoff = 11 set p_pitch = 24 set i_pitch = 78 set d_pitch = 26 set f_pitch = 90 set p_roll = 29 set d_roll = 30 set f_roll = 95 set p_yaw = 45 set i_yaw = 55 set f_yaw = 25 set d_min_roll = 18 set d_min_pitch = 20 set d_min_boost_gain = 30 set d_min_advance = 0 rateprofile 0 # rateprofile 0 set roll_rc_rate = 120 set pitch_rc_rate = 120 set roll_expo = 23 set pitch_expo = 23 set roll_srate = 75 set pitch_srate = 75 set tpa_rate = 80 set tpa_breakpoint = 1700 set throttle_limit_type = SCALE set throttle_limit_percent = 75 # end the command batch batch end
Und heute noch Props reversed (out statt in).