Heute habe ich den Headtracker fertiggestellt und am Helm befestigt. Funktioniert hervorragend.

Außerdem war ich zum fliegen auf der Wiese… aber nur zum testen, 20km/h Wind und 2°C machen keinen Spaß. Die Bildqualität der CMOS-Kamera war entsetzlich schlecht. Das graue Wetter und die Direktmontage am Rahmen (Vibrationen) taten ihr Übriges. Aber ich lerne ja und hab wieder die GoPro 2 drauf (ja ich weiß, die braucht/hat keinen.Headtracker).
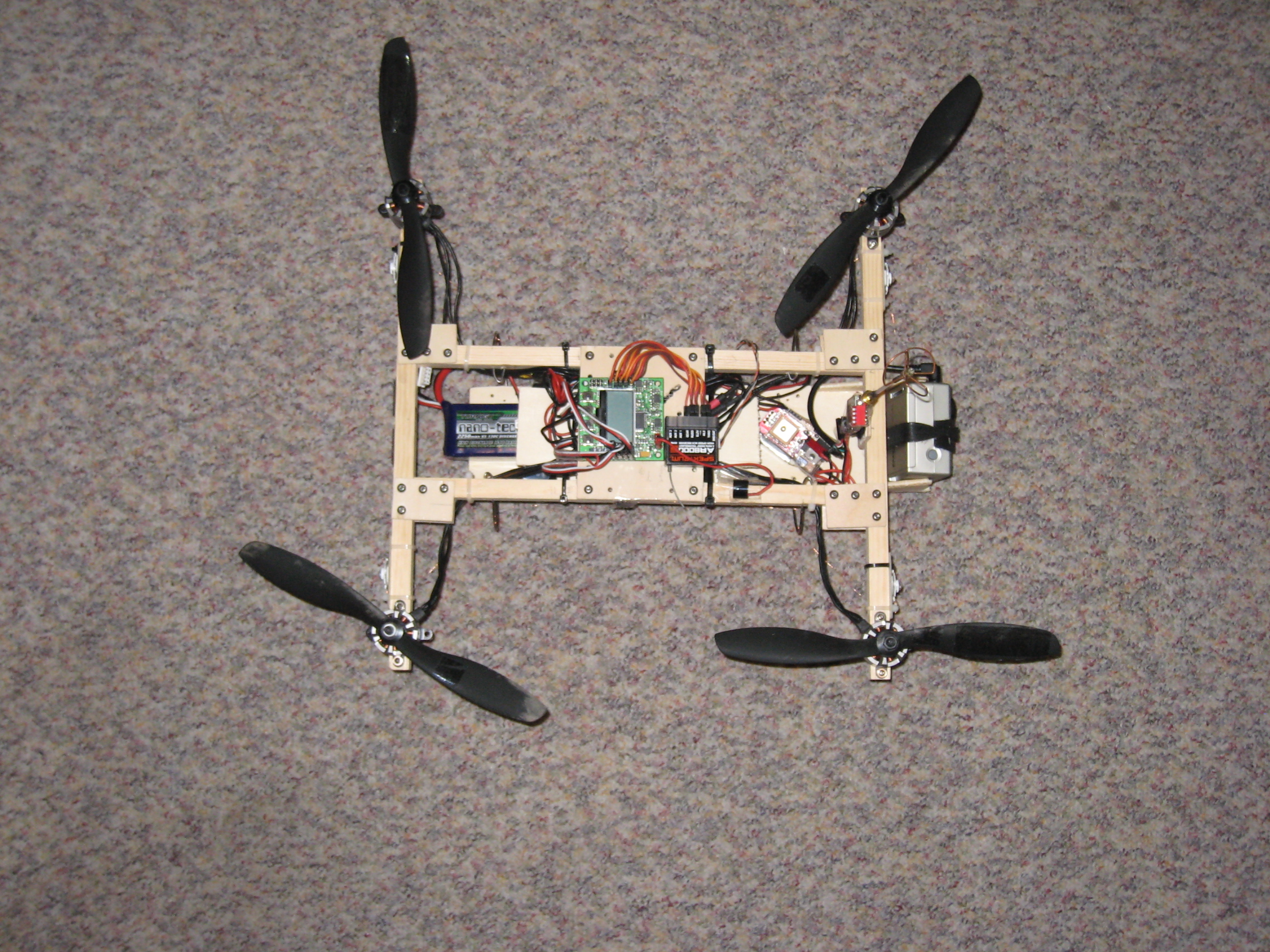
Jetzt wiegt der Quad luftige 1050g und ist damit schon fast zu schwer für die Motoren. Er zieht im Schwebeflug über 10A. Das bedeutet maximal 10-12 Minuten Flugzeit an 2200mAh, dann fällt er wie ein Stein runter! Aber auch so steht er bei heftigem Wind wie eine Eins in der Luft (allerdings nicht im Self-level mode, da treibt ihn der Wind zügig davon…) – aber ich hab ihn im Acro mode in den Wind gekippt und da blieb er dann schön an der Stelle schweben, solange der Wind konstant war.
Die Kapazitätsanzeige funktioniert wunderbar. Ich flog knapp 1000 raus und lud auch 1067mAh wieder rein. Auch das OSD tut seinen Dienst, nur war ich noch zu beschäftigt, mit dem miesen Bild der CMOS-Kamera den Copter zu steuern und so flog ich kaum 50m weit weg.