Frame: 29,61€
Motoren: 4×9,15€
Propeller: 4,20€
ESC: 4×12,62€
FlightControl: 13,55€
Kamera: $29.99 (28,29€)
VTx: 26,89€
Antenne: 3,68€
RX: 24,99€
BEC: ca. 4€
LEDs: 2,18€
Diverse Klett: 0,18€+0,93€
Diverses Zeug aus der Bastelkiste, Tesa: „0€“
Akku 3s 1300: $12.54 (11,83€)
200€ ohne Akku und RX, 237€ komplett.
375g mit 3s 1300. Flugzeit etwa 8-9 Minuten (lockeres Cruising).
Schwebestrom ca. 6-6,5A
Weil ordentlich Euros rumdüsen: Ortungspieper Loc8tor drauf, und Aufkleber mit Anschrift. Mehr als Props sollten aber nicht kaputtgehen.
Evtl. baue ich ihn mal auf UHF+2.4GHz Video um.
Aufbau:
Rahmen bauen, allerdings ohne das Oberdeck. Entweder die mitgelieferten Landestützen nehmen oder Plastikbolzen 2cm einschrauben, die Arme haben die Löcher dafür schon. Die kurzen weißen Plastikbolzen für die FC in die Mitte unten mit Muttern sichern. Die 8xLED mit Servokabel versehen und mit Kabelbinder hinten montieren. Für die Kabel ein Stück blanke Platine nehmen und in die Mitte einen Schnitt fräsen (zwei Schienen). Plus und Minus vom Akku-Stecker anlöten. Dazu noch diverse andere Stecker, z.B. für FPV-Power und Spannungsmessung.
Motoren und Regler:
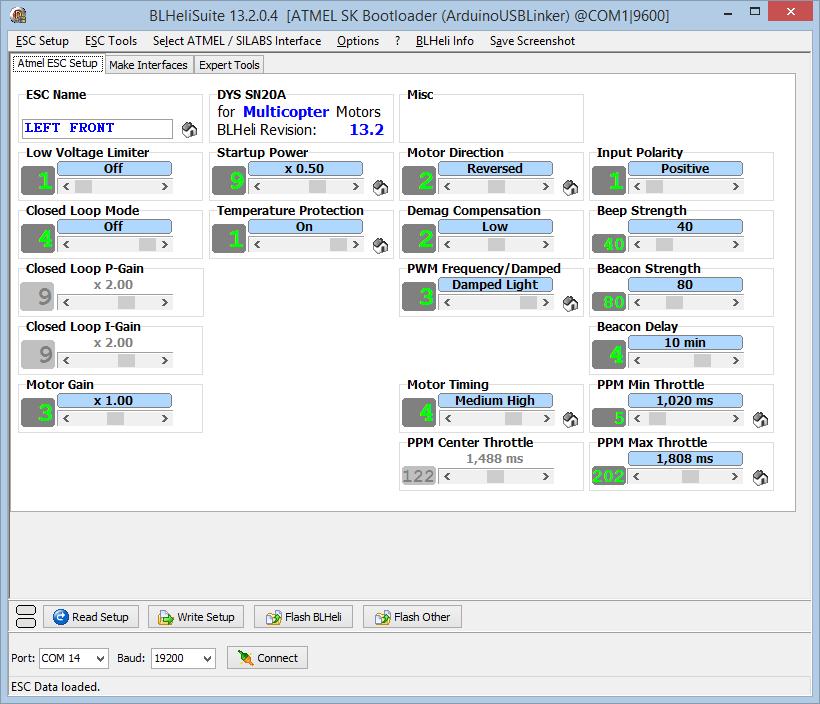
Motoren ölen, Kabel auf 4-5cm kürzen und verzinnen. ESCs aufschneiden und Motorkabel entfernen. Direkt an Motor anlöten. Die Plus/Minus auf die Schienen löten. Die ESCs mit BLHeli flashen und einstellen (Settings siehe unten). Die ESC-Servokabel an die FC stecken. ESC-Wege anlernen und die Drehrichtungen einstellen (CleanFlight Motor-Reiter, manuelle Motorkontrolle, CleanFlight zeigt an, wo welcher Motor angesteckt wird und welchen Drehsinn er haben muss). Die Schienen abkleben (Isolierband) und die FC aufschrauben. Die Motoren werden mit den mitgelieferten Propellermitnehmern versehen und auf die Arme geschraubt. Die ESC sind mit Spiegelklebeband nur aufgeklebt und mit Isolierband fixiert. Da der Rahmen leitet, müssen alle Kabel und Platinen isoliert werden. Der Akku kommt mit einem Klettgurt und Klebestreifen-Klett auf die Unterseite. Die Propeller werden erst nach allen Einstellarbeiten montiert. Idealerweise wuchtet man sie noch aus (z.B. mit Tesa und der manuellen Motor-Steuerung). Ich benutze die mitgelieferten Spinner aus Alu.
FC und RX:
Die FC muss auf Cleanflight umgeflasht werden. Die FC ist bei mir um 90° gedreht, damit der USB frei zugänglich ist und die Motoranschlüsse nach hinten zeigen. Auf den ESC-Steckern klebt der RX mit Servoanschlüsse nach hinten. Der RX liefert SBUS. Die Antennen sind mit Kabelbinder und Schrumpfschlauch vorne fixiert. Die LEDs kommen an Motorausgang 5. Der RX kommt an den Serialport 1 (Main). Der zweite Port ist für das Bluetooth-Modul HC-06. Die Belegung der Ports ist von links nach rechts immer: GND, 5V, TX, RX. Die Mikrostecker werden mit der FC mitgeliefert. Für die Spannungsüberwachung braucht man noch je einen 10k und 1kOhm Widerstand. Schaltung: PlusSchiene-10k-Telemetrie-1k-GND. Die kleine Buchse auf dem RX (X4RSB) ist mit einer analogen Telemetrie bestückt (von links nach rechts: Telemetrie, GND, 5V, SmartPort). Damit die Spannung im Sender stimmt, muss man noch Range A2 einstellen: 36.60v
FPV:
Die Kamera hat einen Alubügel mit M3 Loch in der Mitte. Dafür musste ich ein 3mm Loch bohren, direkt vorne in den Rahmen. Mit einer M3-Schraube und Mutter und zwei Beilagscheiben wird die Kamera festgeschraubt. Damit es besser hält, habe ich noch zwei Mal Flausche-Klett auf den Rahmen aufgeklebt (mehr Reibung – Schutz gegen Verdrehen) und Sicherungslack aufgetragen. Die Kamera hat einen kleinen Stecker mit Video,GND und 5-15V. Der wird direkt an den VTX gesteckt. Mein Stecksystem hat die Belegung Video, Plus 5V, Minus (wie Servokabel). Der VTX ist hinten flach mit Klett und Gurt befestigt, die Antenne (SMA) hat einen 90° Winkel und zeigt somit nach oben. Saft bekommt er über seinen eigenen kleinen Stecker auf den Stromschienen.
Der VTX hat einen Mikro-DIP-Schalter, damit kann man die Frequenz einstellen. Ich benutze Fatshark Kanal 1, weil ich Nexwave-Module am Empfänger nutze. Dieses System ist erprobt, Reichweiten um 800m sind kein Problem.
Die Kamera hat ein OSD, das über ein anderes Kabel bedient werden kann, dieses habe ich auch mit meinem Stecksystem versehen. Die wichtigsten Einstellungen sind WDR an, dann manueller Weißabgleich und Schärfe, Helligkeit und Kontrast je nach Belieben.
Sender:
Ich nutze die Taranis X9D. Für den Quad habe ich eingestellt:
MODEL
Modulation D16
Failsafe: No pulses
STICKS
Alle mit 100 und 20 Expo, außer Throttle.
MIXER
CH5 ist bei mir der SE und CH8 der SA
SERVOS
Alle -98 – +98, die Mitten sind so eingestellt, dass die FC genau Mitte sieht.
Für die Telemetrie: A2 channel Range 36.60v
Dann habe ich noch den SH mit PlayVal A2 belegt, damit ich die Spannung angesagt bekomme.
Settings:
CC3D CleanFlight (Fett, was ich geändert habe):
# dump
# version # Cleanflight/CC3D 1.9.0 May 31 2015 / 13:42:47 (98f7549) # dump master
# mixer mixer QUADX
# feature feature -RX_PPM feature -VBAT feature -INFLIGHT_ACC_CAL feature -RX_SERIAL feature -MOTOR_STOP feature -SERVO_TILT feature -SOFTSERIAL feature -GPS feature -FAILSAFE feature -SONAR feature -TELEMETRY feature -CURRENT_METER feature -3D feature -RX_PARALLEL_PWM feature -RX_MSP feature -RSSI_ADC feature -LED_STRIP feature -DISPLAY feature -ONESHOT125 feature -BLACKBOX feature RX_SERIAL feature FAILSAFE feature LED_STRIP feature BLACKBOX
# map map TAER1234
# serial serial 20 1 115200 57600 0 115200 serial 0 64 115200 57600 0 115200 serial 2 4 115200 57600 0 115200
# led led 0 0,0::IWC:2 led 1 1,0::WATC:2 led 2 2,0:NS:C:2 led 3 3,0:NS:C:2 led 4 4,0:NS:C:2 led 5 5,0:NS:C:2 led 6 6,0::WATC:2 led 7 7,0::IWC:2 led 8 0,0:::0 led 9 0,0:::0 led 10 0,0:::0 led 11 0,0:::0 led 12 0,0:::0 led 13 0,0:::0 led 14 0,0:::0 led 15 0,0:::0 led 16 0,0:::0 led 17 0,0:::0 led 18 0,0:::0 led 19 0,0:::0 led 20 0,0:::0 led 21 0,0:::0 led 22 0,0:::0 led 23 0,0:::0 led 24 0,0:::0 led 25 0,0:::0 led 26 0,0:::0 led 27 0,0:::0 led 28 0,0:::0 led 29 0,0:::0 led 30 0,0:::0 led 31 0,0:::0
# color color 0 0,0,0 color 1 0,255,255 color 2 0,0,255 color 3 30,0,255 color 4 60,0,255 color 5 90,0,255 color 6 120,0,255 color 7 150,0,255 color 8 180,0,255 color 9 210,0,255 color 10 240,0,255 color 11 270,0,255 color 12 300,0,255 color 13 330,0,255 color 14 0,0,0 color 15 0,0,0
set looptime = 2000 set emf_avoidance = 0 set mid_rc = 1500 set min_check = 1100 set max_check = 1900 set rssi_channel = 0 set rssi_scale = 30 set rssi_ppm_invert = 0 set input_filtering_mode = 0 set min_throttle = 1070 set max_throttle = 1850 set min_command = 1000 set servo_center_pulse = 1500 set 3d_deadband_low = 1406 set 3d_deadband_high = 1514 set 3d_neutral = 1460 set 3d_deadband_throttle = 50 set motor_pwm_rate = 400 set servo_pwm_rate = 50 set retarded_arm = 0 set disarm_kill_switch = 1 set auto_disarm_delay = 5 set small_angle = 25 set flaps_speed = 0 set fixedwing_althold_dir = 1 set reboot_character = 82 set gps_provider = 0 set gps_sbas_mode = 0 set gps_auto_config = 1 set gps_auto_baud = 0 set serialrx_provider = 2 set spektrum_sat_bind = 0 set telemetry_switch = 0 set telemetry_inversion = 1 set frsky_default_lattitude = 0.000 set frsky_default_longitude = 0.000 set frsky_coordinates_format = 0 set frsky_unit = 0 set frsky_vfas_precision = 0 set hott_alarm_sound_interval = 5 set battery_capacity = 0 set vbat_scale = 110 set vbat_max_cell_voltage = 43 set vbat_min_cell_voltage = 33 set vbat_warning_cell_voltage = 35 set current_meter_scale = 400 set current_meter_offset = 0 set multiwii_current_meter_output = 0 set current_meter_type = 1 set align_gyro = 0 set align_acc = 0 set align_mag = 0 set align_board_roll = 0 set align_board_pitch = 0 set align_board_yaw = 90 set max_angle_inclination = 500 set gyro_lpf = 42 set moron_threshold = 32 set gyro_cmpf_factor = 600 set gyro_cmpfm_factor = 250 set yaw_control_direction = 1 set pid_at_min_throttle = 1 set yaw_direction = 1 set yaw_jump_prevention_limit = 200 set tri_unarmed_servo = 1 set servo_lowpass_freq = 400 set servo_lowpass_enable = 0 set failsafe_delay = 10 set failsafe_off_delay = 200 set failsafe_throttle = 1200 set rx_min_usec = 985 set rx_max_usec = 2115 set acc_hardware = 0 set mag_hardware = 0 set blackbox_rate_num = 1 set blackbox_rate_denom = 1 set blackbox_device = 0
# dump profile
# profile profile 0
# aux aux 0 2 0 1300 2100 aux 1 0 0 900 900 aux 2 0 0 900 900 aux 3 0 0 900 900 aux 4 0 0 900 900 aux 5 0 0 900 900 aux 6 0 0 900 900 aux 7 0 0 900 900 aux 8 0 0 900 900 aux 9 0 0 900 900 aux 10 0 0 900 900 aux 11 0 0 900 900 aux 12 0 0 900 900 aux 13 0 0 900 900 aux 14 0 0 900 900 aux 15 0 0 900 900 aux 16 0 0 900 900 aux 17 0 0 900 900 aux 18 0 0 900 900 aux 19 0 0 900 900
# adjrange adjrange 0 0 0 900 900 0 0 adjrange 1 0 0 900 900 0 0 adjrange 2 0 0 900 900 0 0 adjrange 3 0 0 900 900 0 0 adjrange 4 0 0 900 900 0 0 adjrange 5 0 0 900 900 0 0 adjrange 6 0 0 900 900 0 0 adjrange 7 0 0 900 900 0 0 adjrange 8 0 0 900 900 0 0 adjrange 9 0 0 900 900 0 0 adjrange 10 0 0 900 900 0 0 adjrange 11 0 0 900 900 0 0
# servo servo 0 1020 2000 1500 30 -1 servo 1 1020 2000 1500 30 -1 servo 2 1020 2000 1500 100 -1 servo 3 1020 2000 1500 100 -1 servo 4 1020 2000 1500 100 -1 servo 5 1020 2000 1500 100 -1 servo 6 1020 2000 1500 100 -1 servo 7 1020 2000 1500 100 -1 servo 8 1020 2000 1500 100 -1 servo 9 1020 2000 1500 100 -1
set gps_pos_p = 15 set gps_pos_i = 0 set gps_pos_d = 0 set gps_posr_p = 34 set gps_posr_i = 14 set gps_posr_d = 53 set gps_nav_p = 25 set gps_nav_i = 33 set gps_nav_d = 83 set gps_wp_radius = 200 set nav_controls_heading = 1 set nav_speed_min = 100 set nav_speed_max = 300 set nav_slew_rate = 30 set alt_hold_deadband = 40 set alt_hold_fast_change = 1 set deadband = 0 set yaw_deadband = 0 set throttle_correction_value = 0 set throttle_correction_angle = 800 set default_rate_profile = 0 set gimbal_flags = 1 set acc_lpf_factor = 4 set accxy_deadband = 40 set accz_deadband = 40 set accz_lpf_cutoff = 5.000 set acc_unarmedcal = 1 set acc_trim_pitch = 0 set acc_trim_roll = 0 set baro_tab_size = 21 set baro_noise_lpf = 0.600 set baro_cf_vel = 0.985 set baro_cf_alt = 0.965 set mag_declination = 0 set pid_controller = 1 set p_pitch = 40 set i_pitch = 20 set d_pitch = 20 set p_roll = 50 set i_roll = 30 set d_roll = 20 set p_yaw = 85 set i_yaw = 45 set d_yaw = 0 set p_pitchf = 2.500 set i_pitchf = 0.600 set d_pitchf = 0.060 set p_rollf = 2.500 set i_rollf = 0.600 set d_rollf = 0.060 set p_yawf = 8.000 set i_yawf = 0.500 set d_yawf = 0.050 set level_horizon = 3.000 set level_angle = 5.000 set sensitivity_horizon = 75 set p_alt = 50 set i_alt = 0 set d_alt = 0 set p_level = 90 set i_level = 10 set d_level = 100 set p_vel = 120 set i_vel = 45 set d_vel = 1 set yaw_p_limit = 500
# dump rates
# rateprofile rateprofile 0
set rc_rate = 120 set rc_expo = 20 set rc_yaw_expo = 0 set thr_mid = 40 set thr_expo = 10 set roll_rate = 30 set pitch_rate = 30 set yaw_rate = 50 set tpa_rate = 0 set tpa_breakpoint = 1400
BLHeli: