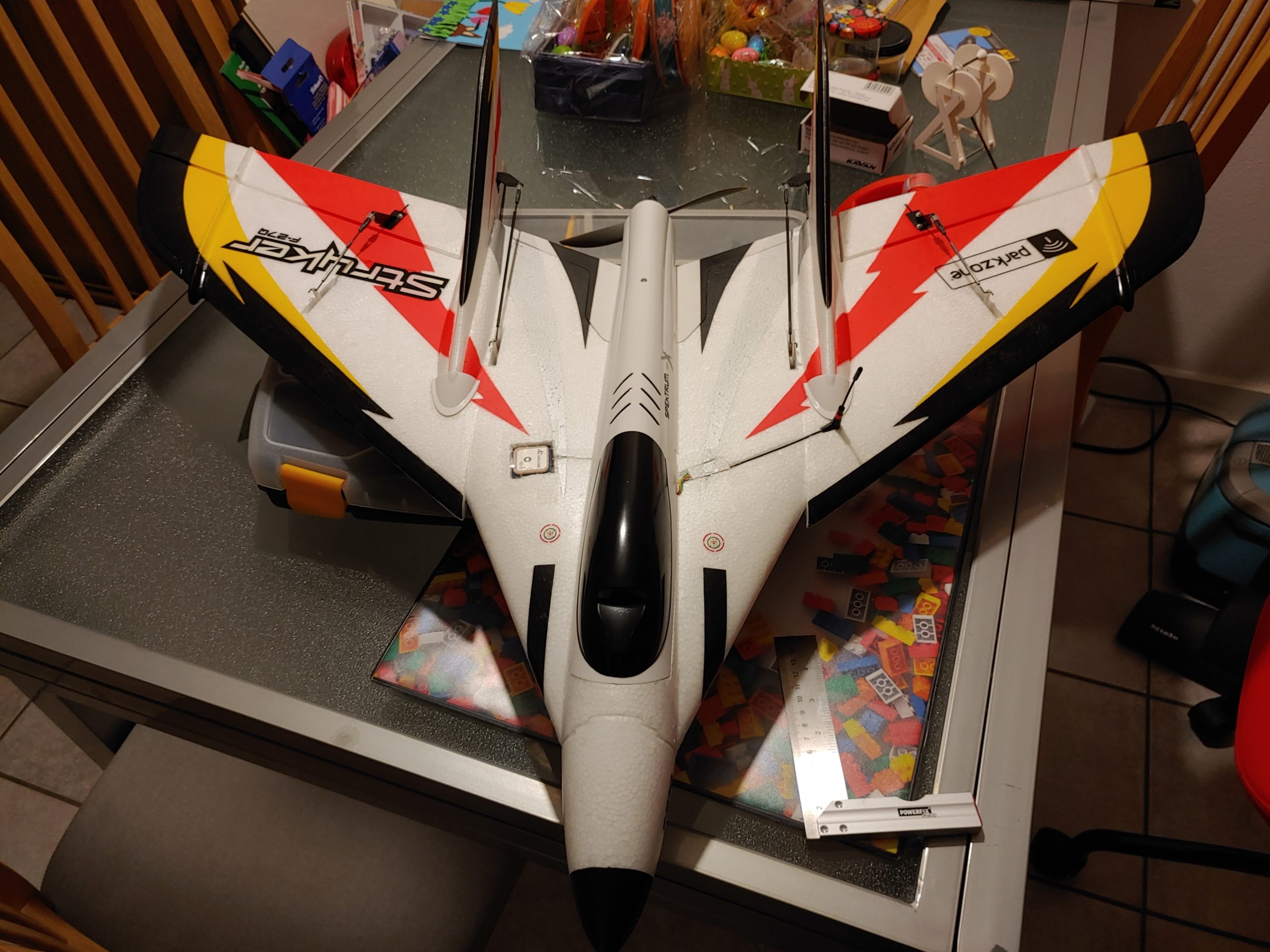
Heute hab ich meinen zweiten PZ Stryker F-27Q fertig gebaut.
Die riesen Schachtel lag schon jahrelang unterm Bett. Und der erste Stryker ist schon arg ramponiert.
Das Modell bekam einen neuen Regler und Motor.
Hobbywing Skywalker 60 ubec und Sunnysky X2814 1250kv, ja für 6s soll es sein.
Dazu noch alle Schikanen mit F4 Omnibus pro mit inav, GPS und Crossfire. Da gibt’s die Telemetrie auch gleich, Strom, Speed, Entfernung, alles. Und später FPV in die Nase.
Trotz dem schweren Motor mit 108g und Regler mit 65g wird es nicht leicht, den Schwerpunkt zu erreichen. Der Akku sollte also leicht bleiben…
Crossfire benötigt lediglich einen UART. Da nimmt man doch gleich den, der sonst SBUS macht. UART1 auf einem Omnibus F4 Pro v3. Damit das klappt, muss die kleine Solderbridge für SBUS/PPM ab!
An den 4pin Micro-JST neben dem Shunt steckt man dann den Empfänger. Die Belegung ist:
[Shunt] GND 5V TX1 RX1
Der CRFS-Nano-RX V2 hat:
GND (auf Höhe des U.FL, quadratisch bei den neuen) 5V Ch1 – TX Ch2 – RX
Der EP1 vom ExpressLRS sieht da ähnlich aus:
GND (mit kleinem Pad daneben) VCC 5V TX RX
Im INAV-Konfigurator stellt man das Protokoll noch auf CRSF und aktiviert gleich noch die Telemetrie.
Mein zweiter DJI-Luftnagel (ich hab ja auch einen uralten F450 Hexa mit DJI Naza).
Erste Erfahrungen:
Lädt an USB (aber mit Quickcharge) – so 18W gehen rein.
Handy erforderlich mit App und man muss locker 10 Info-, Lizenz-, Vertrags-, etc Texte abnicken.
Kompakt und leicht. Das Plastik wirkt schon grenzwertig dünn. DJI hat wohl an jedem Teil Gewicht abgespeckt.
Mein altes Handy (LG G5) geht sogar. Allerdings ist das Display für draußen zu schwach. Man erkennt also nicht gut, was die Kamera sieht.
Einmal Kompass kalibrieren, dann kann’s losgehen (wie beim Naza).
Starten kann er auf Knopfdruck.
Beim Landen hapert’s dann an der Fläche (Feldweg) – den findet er nicht wieder und jammert dass ich doch bitte manuell landen möge. Ja mei. Beim manuellen Landen fragt er dann lieber nochmal, ob man da wirklich landen mag. Ja scho, echt. Ist für mich jetzt kein Beinbruch.
Auto-RTH fliegt brav auf die konfigurierte Höhe und kommt dann runter (wo er dann den Feldweg nicht findet).
Die Steuerung ist flüssig. Fetzt auch nett rum, das Teil.
Das Gimbal hält das Bild immer gerade.
Das Set ist schnell flugbereit (wenn man das Handy schon in der Funke hat). Arme aufklappen, Gimbal-Cover runter, anschalten, kurz warten. Los geht’s.
Und super kompakt ist das Set auch. Man kann die Knüppel abschrauben und am Sender verstauen. Da passt das Gerät in zwei Hosentaschen.
Im Vergleich zum F450 ist er nano-klein 🙂
Das Gimbal und die 4k-Kamera sind natürlich auch ein Schmankerl.
Der HV-LiPo-Akku soll 200 Ladezyklen halten. Er wird automatisch nach ein paar Tagen auf Storagespannung entladen (intern).
Diverse Youtuber erreichen Reichweiten von etwa 3km. In FCC etwas über 4 (dann ist der Rückflug erforderlich).
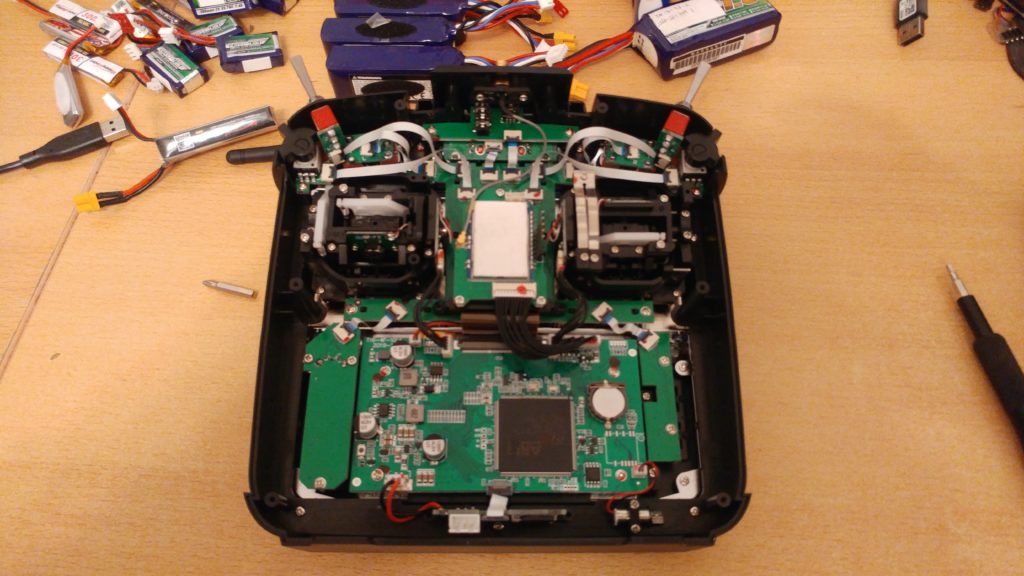
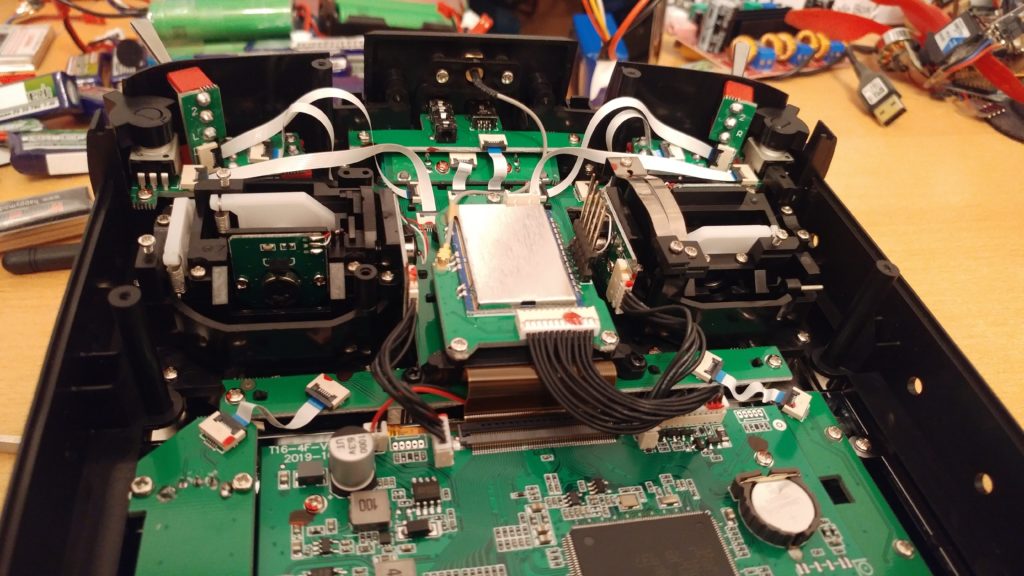
Ich musste einfach mal reinschauen! So ordentlich!
Ich hatte einen Schalterdefekt, war aber nur ein schlecht gestecktes Kabel.
Cookie-Zustimmung verwalten
Wir verwenden Cookies, um unsere Website und unseren Service zu optimieren.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Vorlieben
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.