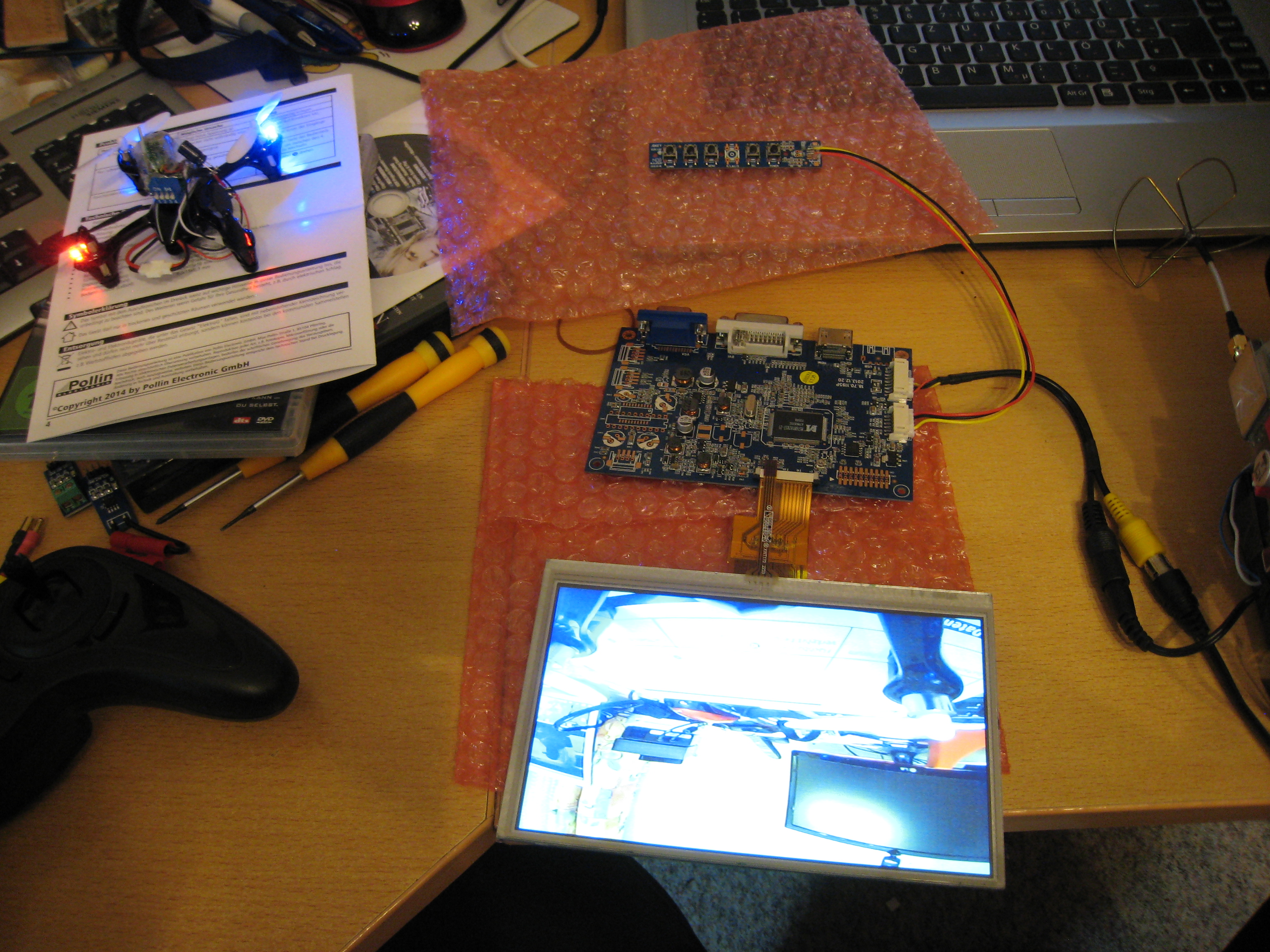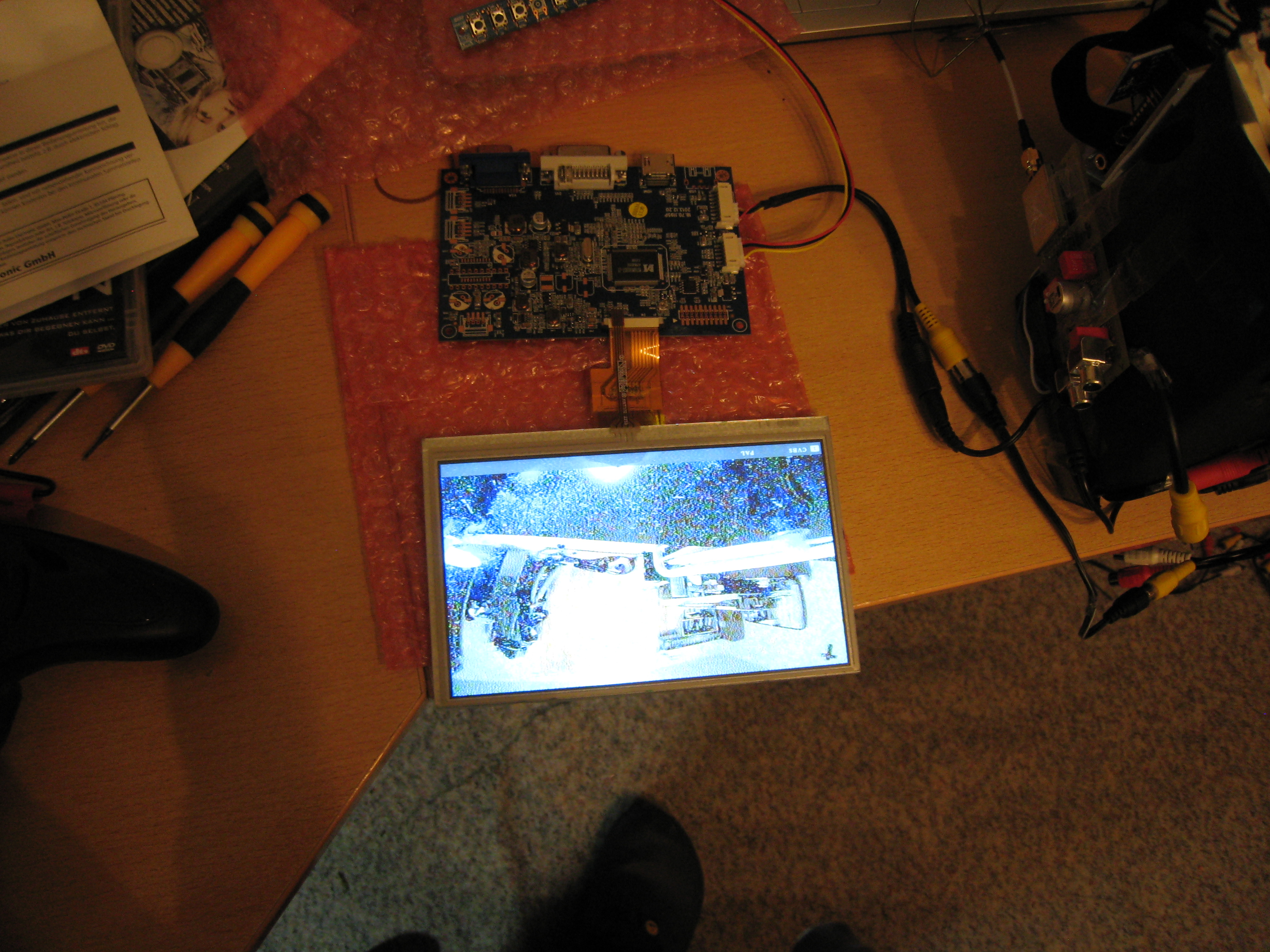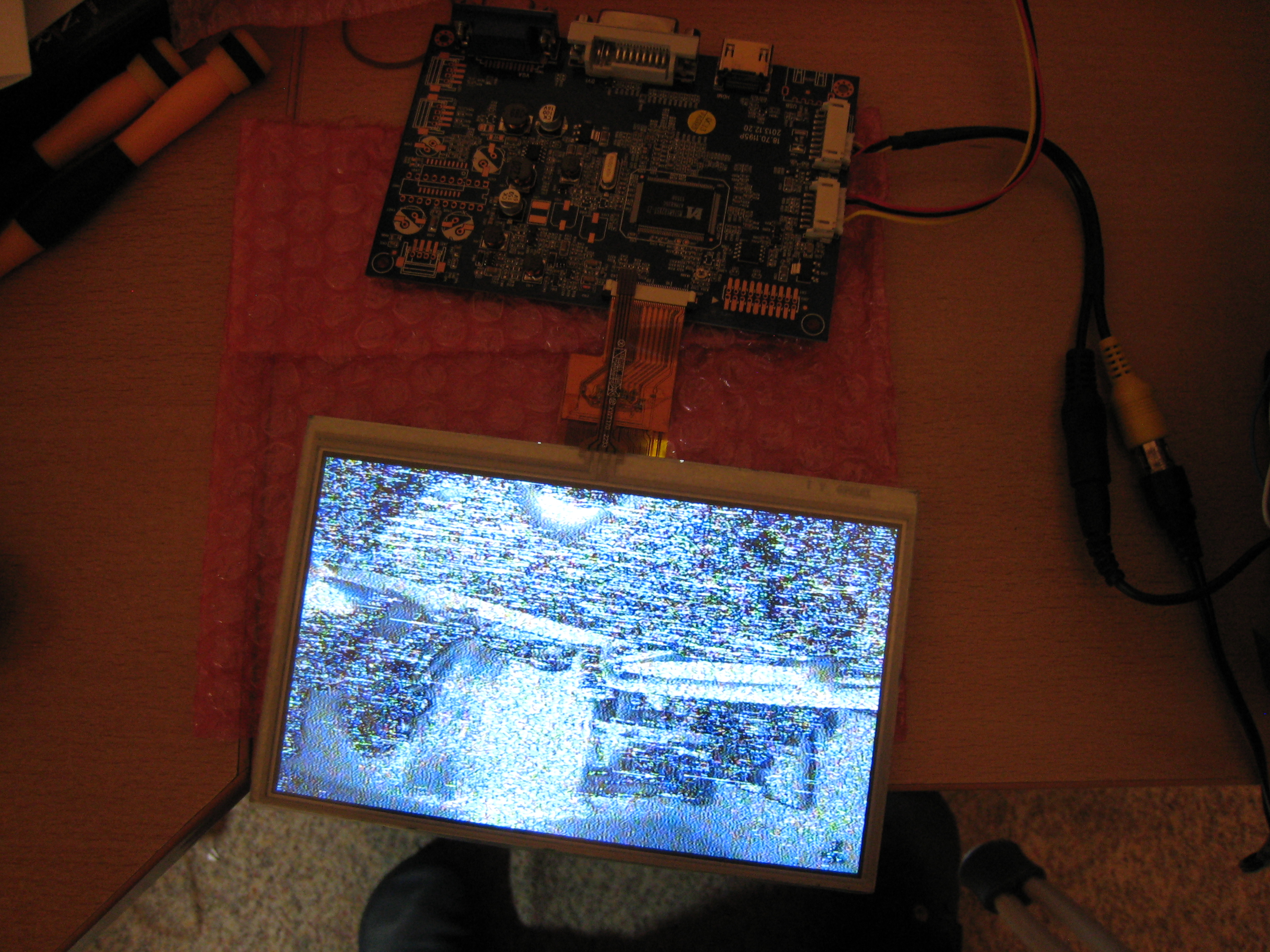
Und so kommt zusammen, was ich in den letzten Monaten alles bestellt habe:
- 3,5″ TFT-Bildschirm 4:3 (niedrige Auflösung, dafür nur 9€)
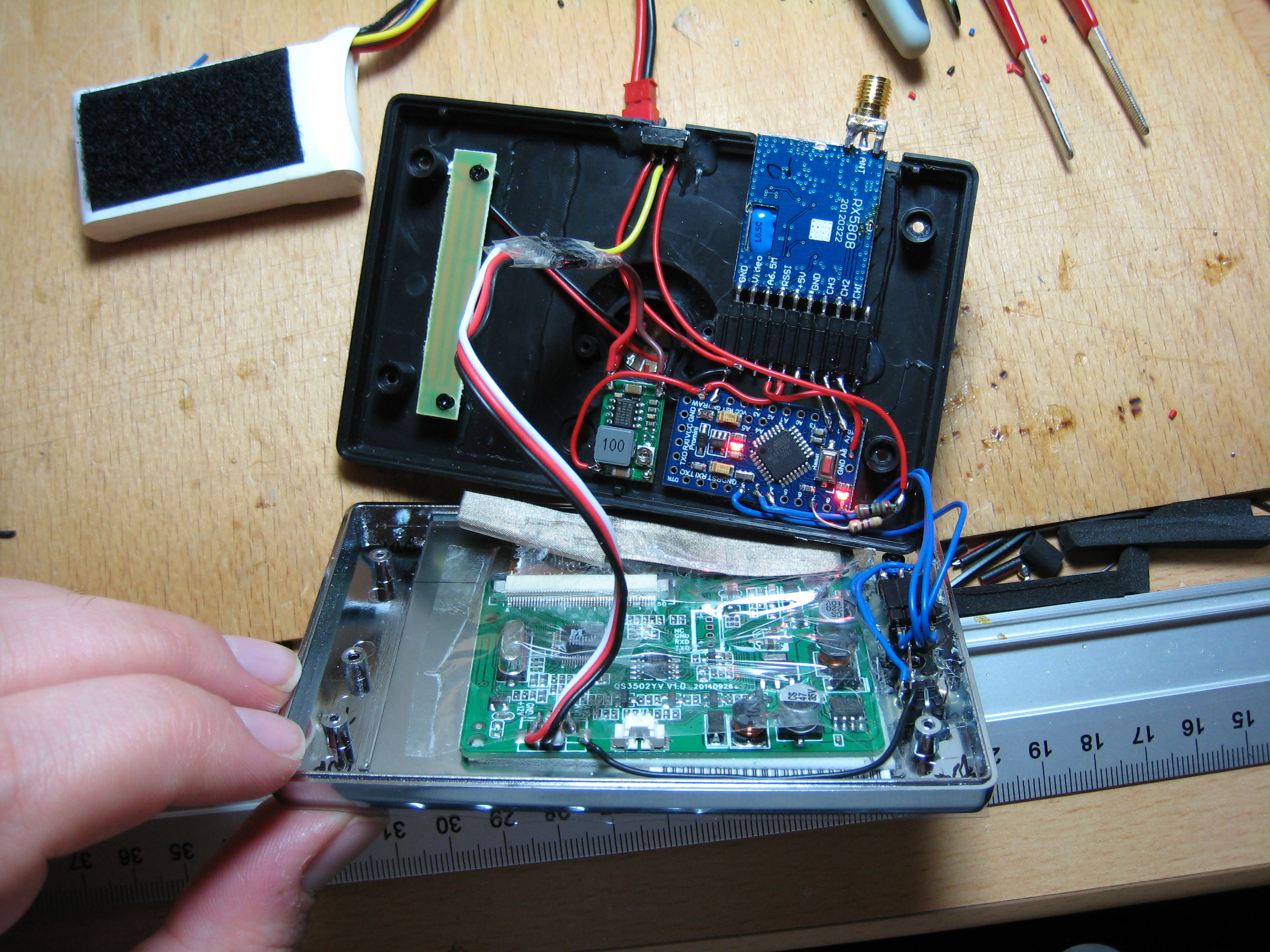
- RX5808-Empfänger auf SPI umgebaut (ca. $12)
- Arduino Pro Mini für knapp $3
- Switching Step-Down einstellbar ($1)
Dazu noch ein paar Kabel, ein Umschalter, 3 Taster und Stecker/Buchsenleisten. Die 3 Taster steuern den Betrieb: Up, Mode, Down. Im Mode kann man aus dem Menu wählen:
- Auto-Search (sucht stärksten Sender)
- Bandscanner (scannt alle Bänder und zeigt einen RSSI-Verlauf)
- Manual Mode (Taster stellen Kanal ein)
- Switch Mode (Externer DIP-Schalter mit 5 Schaltern, hab ich nicht hingebastelt)
- Save (speichert zuletzt benutzen Mode und Band ab, fürs nächste Anschalten) – Save erlaubt auch die RSSI-Kalibrierung (Mode gedrückt halten)
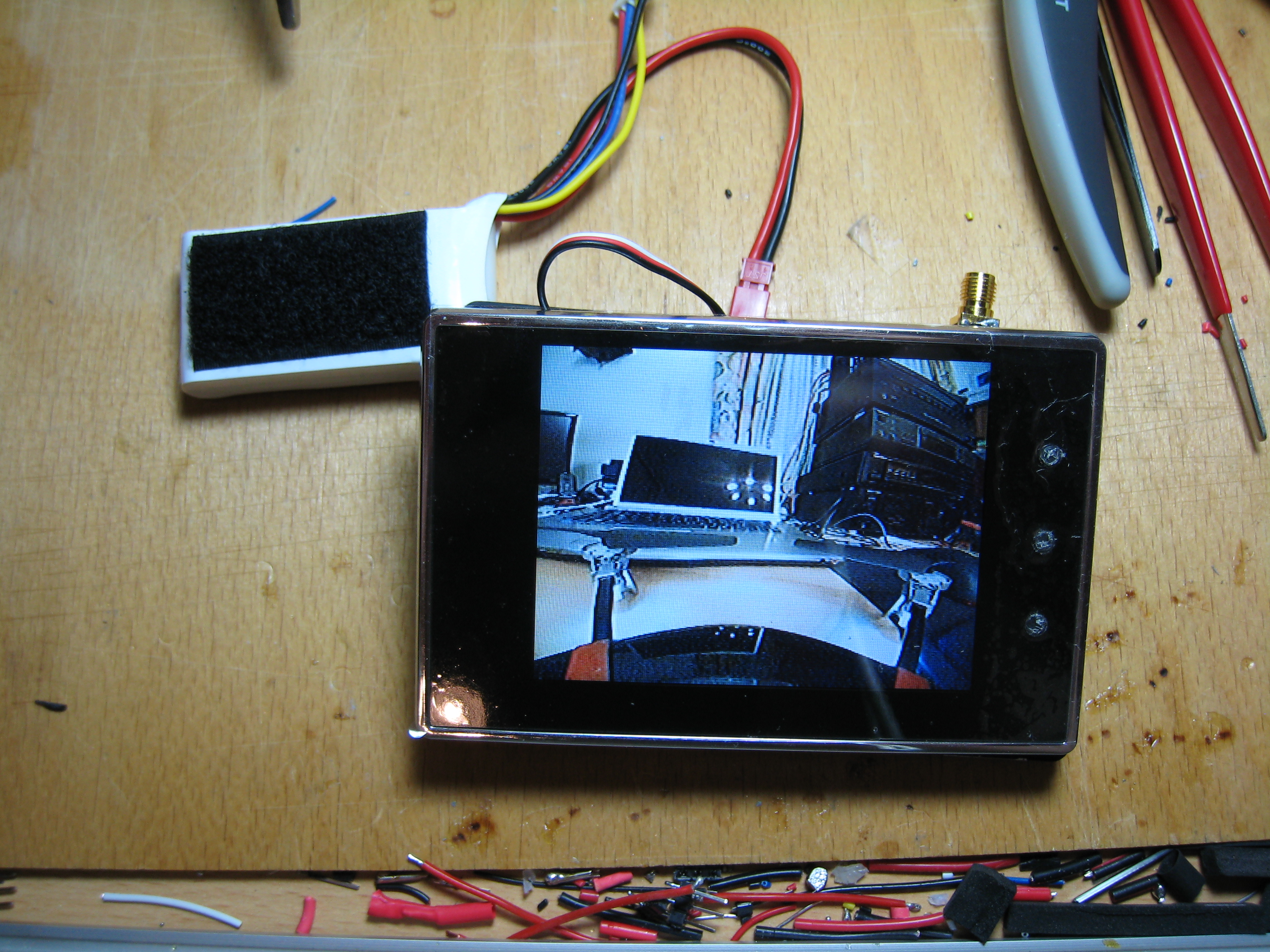
Leider geht das Gehäuse nicht ganz zu, weil die Platine im Bildschirm dicke Spulen hat…
Noch ein Klett für den 3S-Akku hinten dran, fertig.
Stromaufnahme: ca. 300mA