

Aus Mini-Tri wird Race-Tri!
Der alte Frame kommt weg, den hab ich zu oft gesmasht! Aber er war extrem reparatur-freundlich – deshalb wird der Mini-Race-Tri auch aus Balsa werden. Und KAPA für den Aufbau. Die Flightcontrol kommt etwas erhöht, dann kann ich FPV-Sender/Akku/etc unten drunter einschieben. Je nach Schwerpunktproblematik.
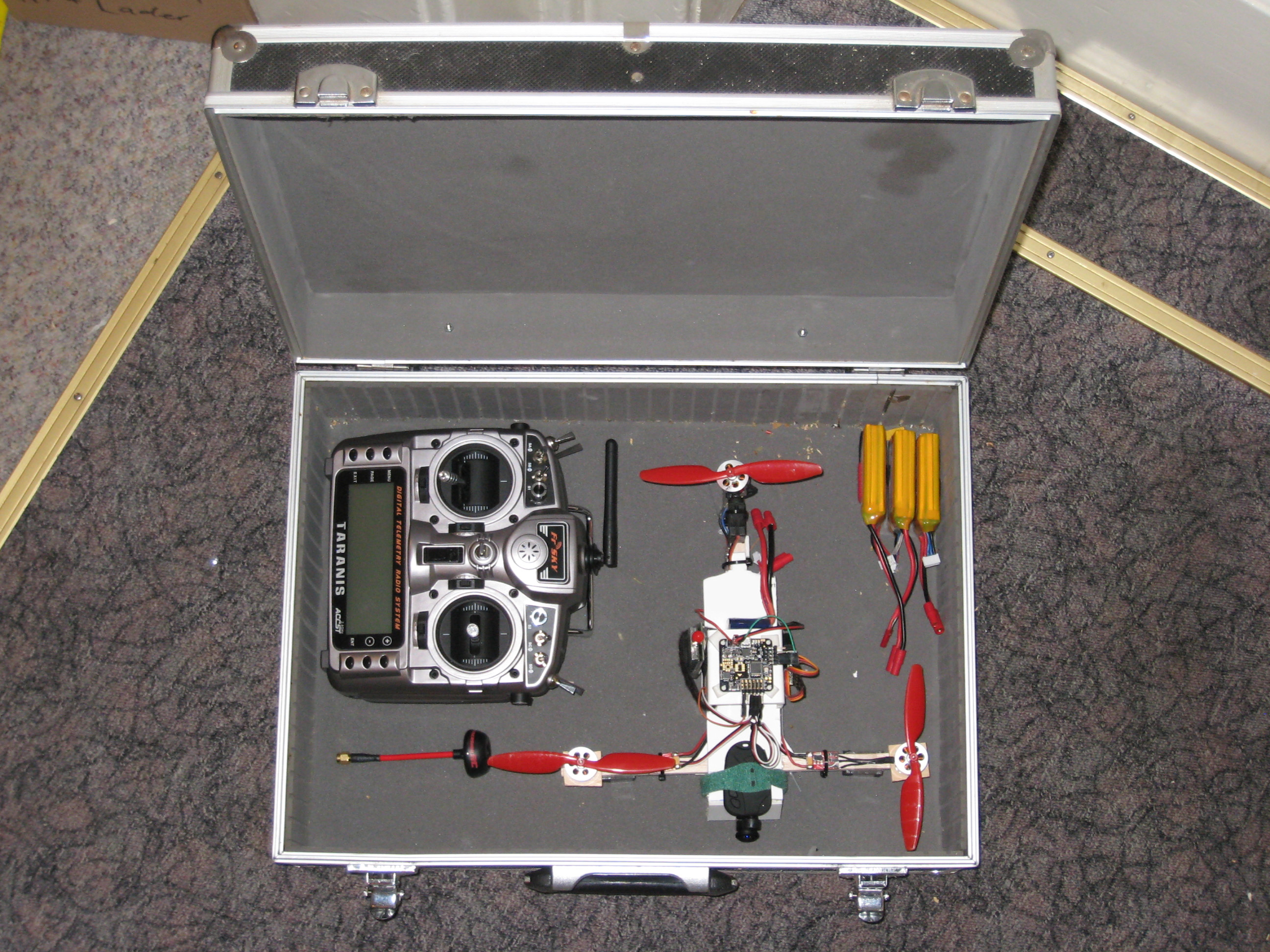
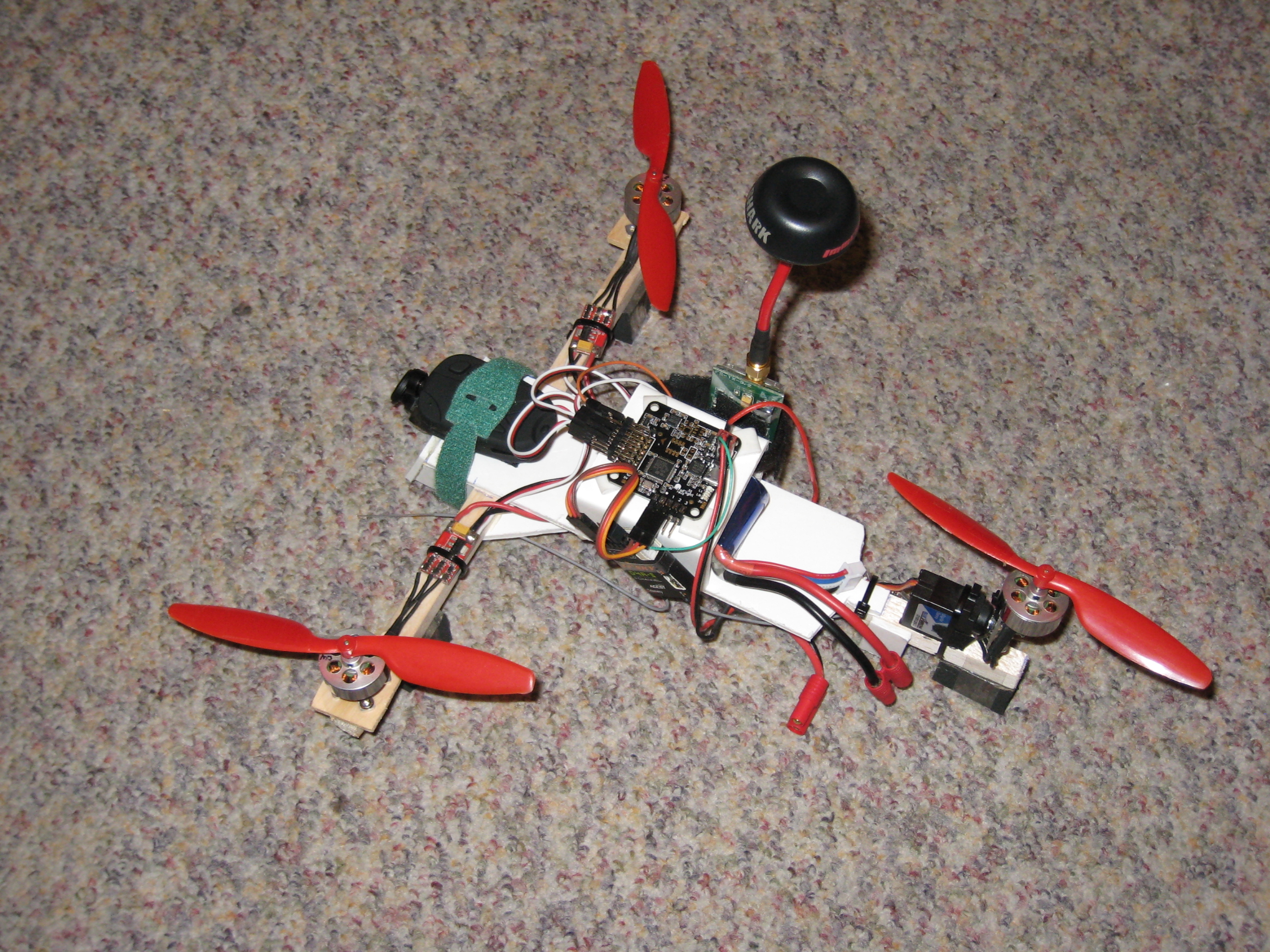
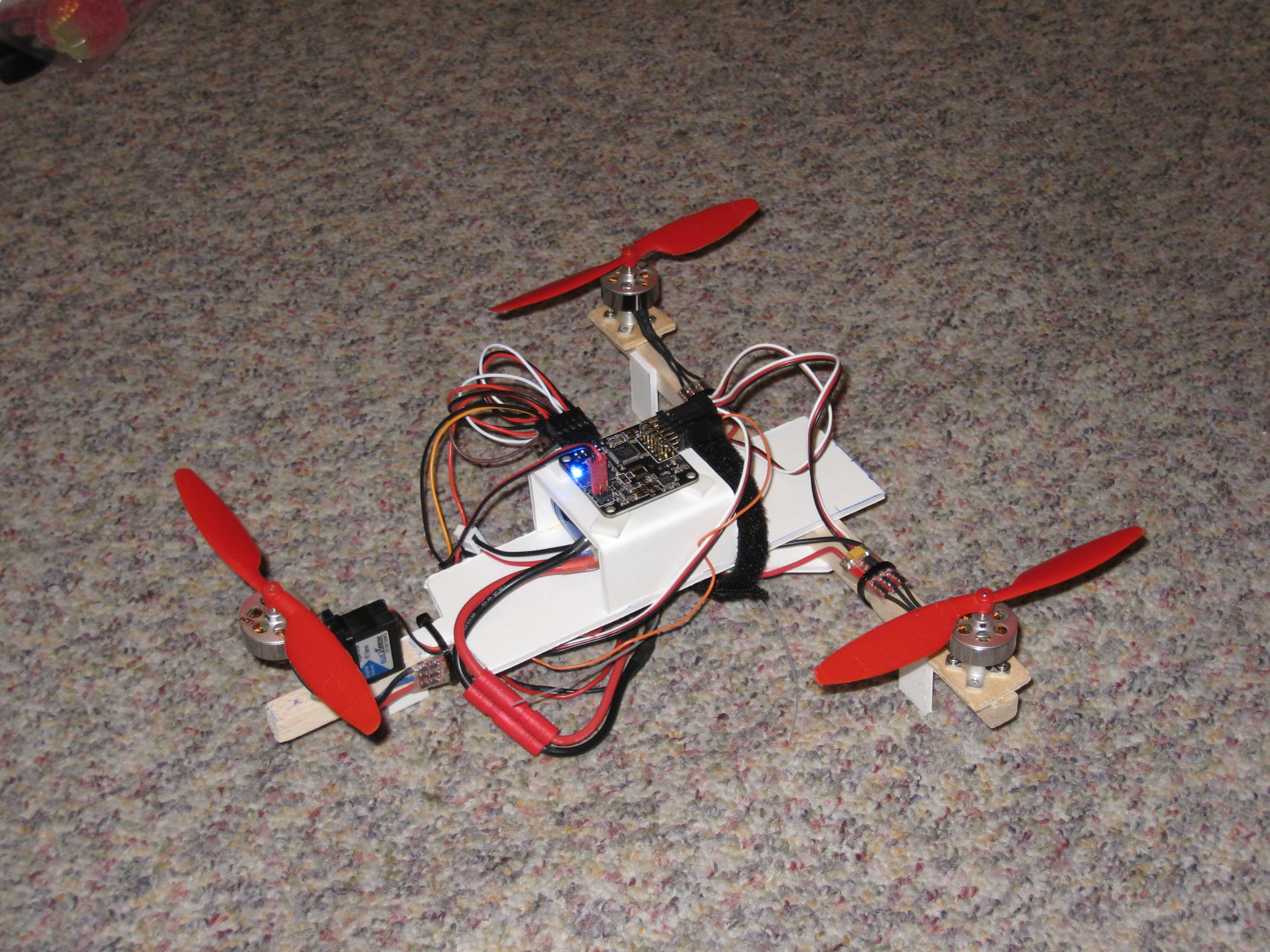
Die ganze Elektronik habe ich unverändert übernommen (außer getauschten und gewuchteten Propellern und gekürzte Kabel). Die Motoren sind die guten Hextronik 20g 2300kv (die haben keinen echten Namen!) Sie sind sauber rundlaufend, wohl ausgewuchtet. Dafür haben sie 2mm Wellen, da bohre ich die kleinen 5×3 Props auf und quetsche sie mit Gewalt auf die Welle. Das hält. Als Regler kommen die HK 6A mit 0,5A BEC auf SimonK umgeflasht zum Einsatz. Für das Servo tut noch ein extra mini LDO REG103-5 im SO8-Package + Kondensator seine Arbeit (der ESC hat das Servo nicht mehr gepackt…). Der wird aber gut warm an 3S! Für FPV habe ich auch gleich einen Stecker mit der 3S-Boardversorgung herausgeführt. Der Empfänger ist ein FrSky V8R7-II. Der wird aber dem D4R-II weichen, der kann ein Summensignal ausgeben und hat Telemetrie. Oder gleich ein Mini OpenLRS+2.4GHz Video…
Fertig: Der 13,3g Frame aus Balsa+KAPA, 22,2cm Abstand der Motoren. Schön mit Heißkleber geleimt. Der fertige Tri wiegt ohne Akku 137g, Akku 70-90g (3s 750-1000). Der Stromstecker ist noch viel zu schwer, da kommt was leichteres dran; und eben der kleine D4R-II mit Summensignal, das spart jede Menge Kabelsalat ein…
Zuerst mit dem vorigem KK2.0-Board noch zum Testen (keine Änderung an den Einstellungen erforderlich!)
Dann mit Naze32/baseflight – da musste ich mit den Defaults gut runter auf 4,0/0,030/16 3,0/0,030/10 für Nick+Roll und 3,0 2,5/defaults für Yaw. Das Servo war auch nicht mittig, das musste ich in Hardware neu ausrichten. Echte Testflüge stehen noch aus, schließlich soll der Race-Tri seinem Namen alle Ehre machen und mit FPV durchs Unterholz bügeln 🙂 Zimmerschweben klappt ja schon mal. Und wenn Naze32 nicht klappen sollte, kann ich ja auf das KK mini gehen.
Update: Testfliegen im Garten ergab nochmal geringere P-Werte! Und dann fand ich im Netz noch den Warpquad, der mit naze32 auch seine Settings postete, der hat 2,2P/defaults! Und noch ein paar Tricks, um das Vibrieren im Hover und darunter zu zähmen. Und der auch die Geschwindigkeit der Control-Loop an die ESCs angepasst hat. Das muss ich auch testen. Mit FPV dürfen halt keine hochfrequenten Zitterer mehr auf dem Copter sein!
Und dann kommen ja noch die Rate-Einstellungen! PID-Rate, RC-Rate, Expo… aber so auf Sichtflug hat er mir schon sehr gut gefallen. Wenn ich den Knüppel 2/3 bewege, dreht er auch zackig. Flippen müsste also auch gehen.
Drei Profile kann man auf der naze32 auch anlegen, z. B. für gemütliches FPV, Racemodus und Acroturnen mit giftigen PIDs.
Schweben kann der Race-Tri bei knapp Halbgas. Vollgastests katapultieren ihn in den Himmel ohne die Propeller abzuwerfen – gut! Er wird sicherlich nicht der allerschnellste Racer sein, aber für den kostengünstigen Anfang tut er’s.
Update 2: Weiteres Testfliegen mit verkürzter Loopzeit (2500) erlaubte es mir, die P-Werte ordentlich zu erhöhen! Die aktuellen Parameter liegen etwa bei 4,5P/0,045I/30D, bei Yaw auch wieder mehr. Der Failsafe ist jetzt auch an (über naze32), muss aber genauso wie Level/Angle-Modus noch erprobt werden. Der Copter schwebt bereits mit Throttle auf 1400.
Update 3: Levelmodus klappt, Failsafe benutzt ihn automatisch. Nur: Failsafe schaltet für 1 Sekunde alle Motore auf Vollgas! Dann eingestellte Failsafe-Throttle für eingestellten Delay. Da es zwei Delays gibt, nehme ich an, dass der interne Failsafe des FrSky-Rx da was macht. Da muss ich noch spielen.
Dazu habe ich noch die Spannungsüberwachung angehängt. Ich werde mal den Rx gegen den kleinen D4R tauschen, Telemetrie anmachen und das Kabel fertig an Plus anlöten.
Was kostet der Mini-Race-Tri denn etwa?
- 3x Regler 6A HK je $7,24
- 3x Motor hextronik 20g 2300kv je $7,55
- 1x Propellerset 5×3 (3xCW, 3xCCW) für $3,49
- 1x Servo BlueArrow 12g digi MG (keine Ahnung, war noch übrig) – ein beliebiges digitales MG Servo 9-15g halt – dieses kostet glaub ich 15€
- 1x naze32 für $23,99
- Je nach Belieben Empfänger, hier FrSky V8R7-II für $17,95
- Akku 3s 750-1000 30C+, hier Conrad 3S 800 40C für 7€ (war im Angebot plus Gutschein, hab gleich 3 genommen, leider sind sie etwas dick)
- 1 Stange 1m Balsa Vierkant 10x10mm, glaube ich 1-2€
- KAPA-Platte 3mm (oder Wellpappe)
- Tesa, Heißkleber, Kabelbinder
- Akkustecker, Litze
Macht in Summe ca. $72 für die HK-Teile ohne Kleinkram, Akku, Rx und Servo. In Summe für mich etwa 93€ flugfertig. Mit den diversen Versandkosten kommen da bestimmt runde 100 raus 🙂
Die Belegung an der naze32 ist auch ungewohnt: Servo an M1, hinterer Motor an M3, dann gegen den Uhrzeigersinn M4 und M5. Die Konfiguration am PC klappt über Baseflight/Chrome. Da kann man alles einstellen, auch während der Copter Strom hat. Das Servo zuckelt und regelt immer! Auch wenn man den Rudderstick zum Armen oder Profilumschalten in die Ecken bewegt.