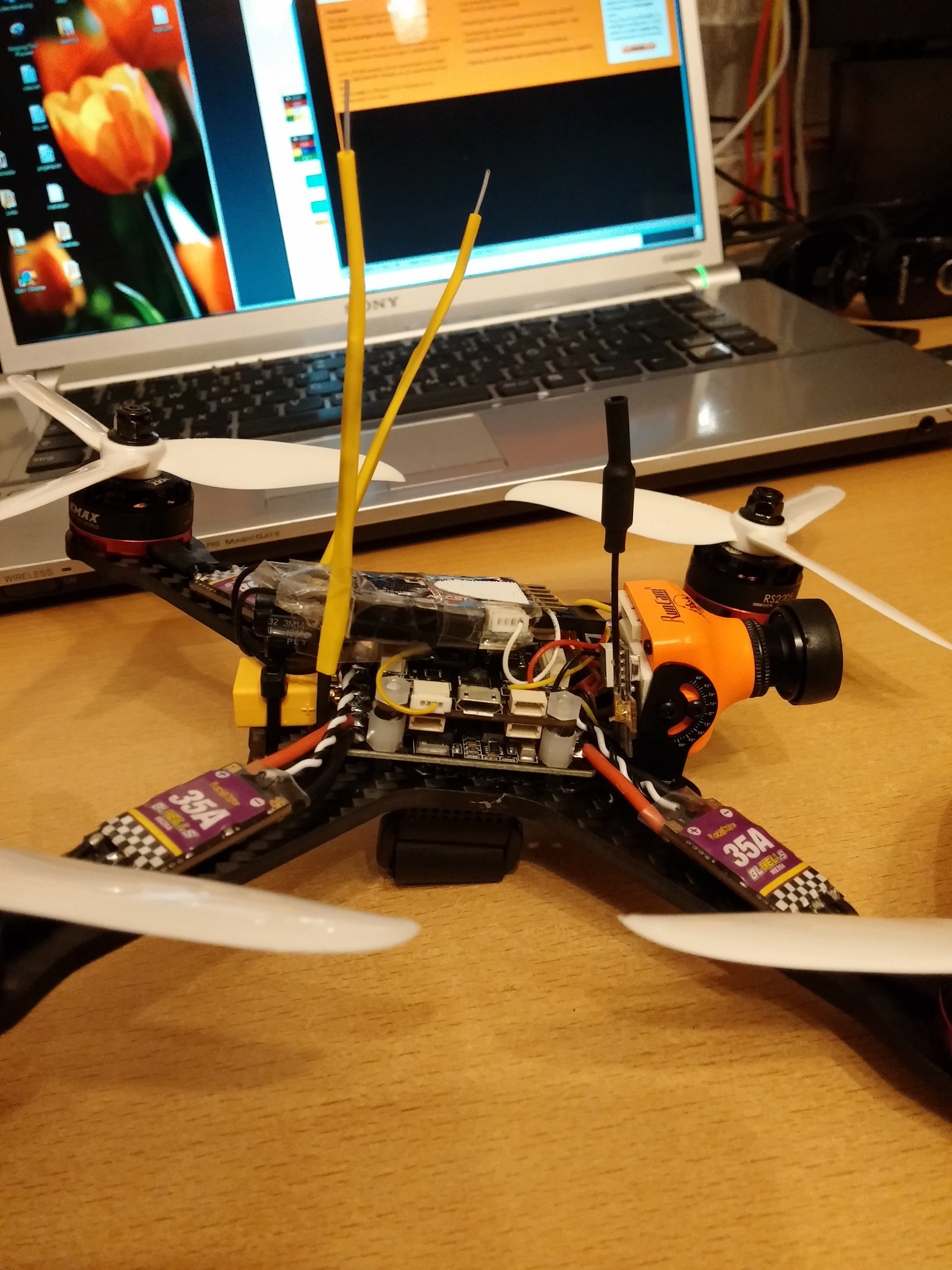
Das sollte hoffentlich robuster sein als die erste Lösung. Die AIO-Cam ist jetzt aufgetrennt. Der Sender mit Antenne steckt unter einer Acrylkugelhälfte. Die Kamera hat Schutzwände aus einem Assorter-Fachteiler. Die Klebeverbindungen sind Sekundenkleber und Heißkleber.
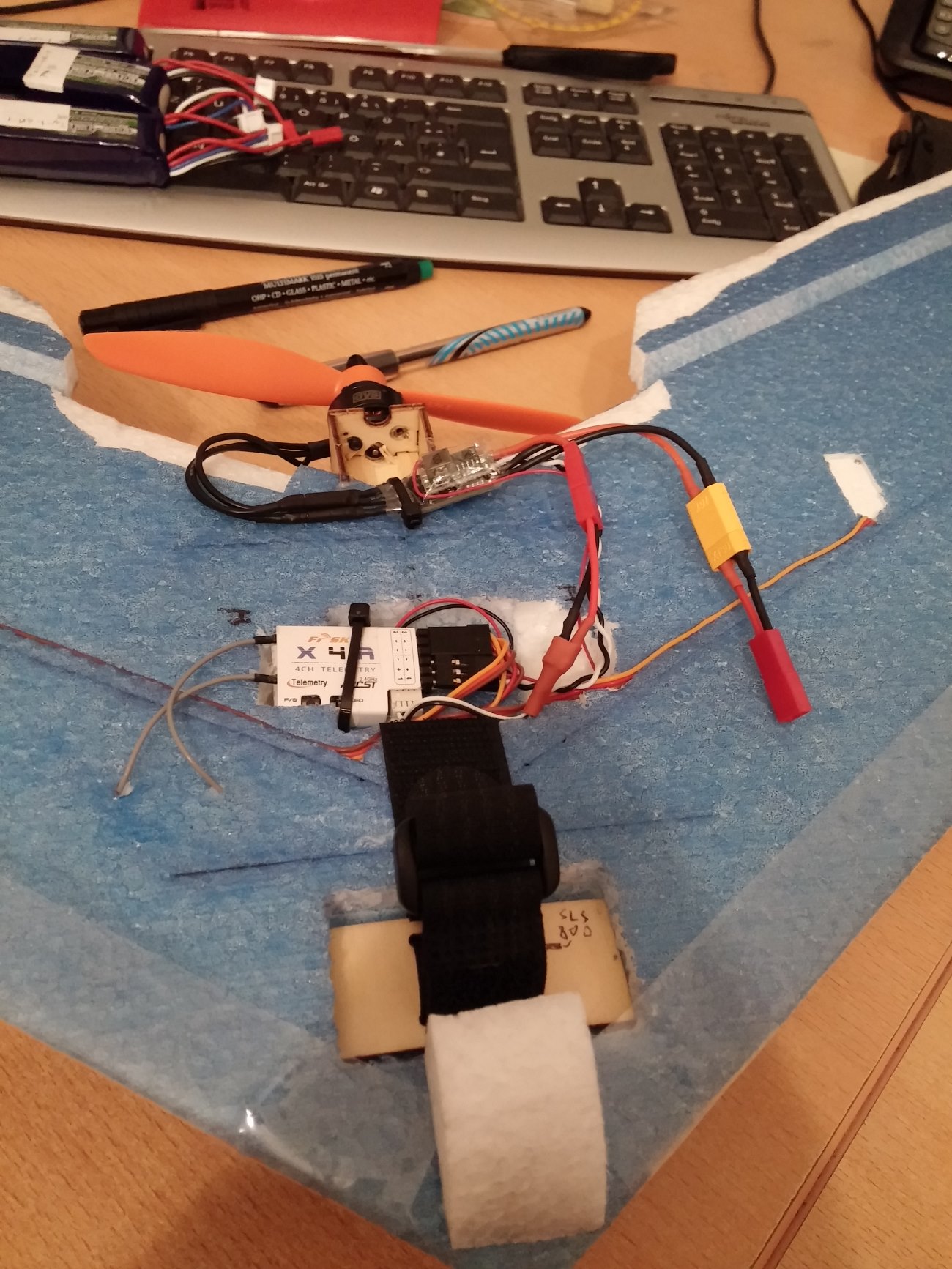
Der Motorträger hat zu wenig Sturz und der Seitenzug geht in die falsche Richtung (daher habe ich den Prop gewechselt und etwas Plastik untergelegt, damit der Motor nach unten zeigt). Die Ruder habe ich unten flächig mit einer Rasierklinge abgehobelt – hoffentlich behebt das das seltsame Loopingverhalten mit anschließendem Trudeln…