
Und schon ist er wieder ganz – nur die Nase zeigt jetzt leicht nach rechts. Ordentlich Sekundenkleber und er fliegt wieder!
Ich sollte wirklich an meiner Wurfmethode arbeiten 🙂
Und schon ist er wieder ganz – nur die Nase zeigt jetzt leicht nach rechts. Ordentlich Sekundenkleber und er fliegt wieder!
Ich sollte wirklich an meiner Wurfmethode arbeiten 🙂
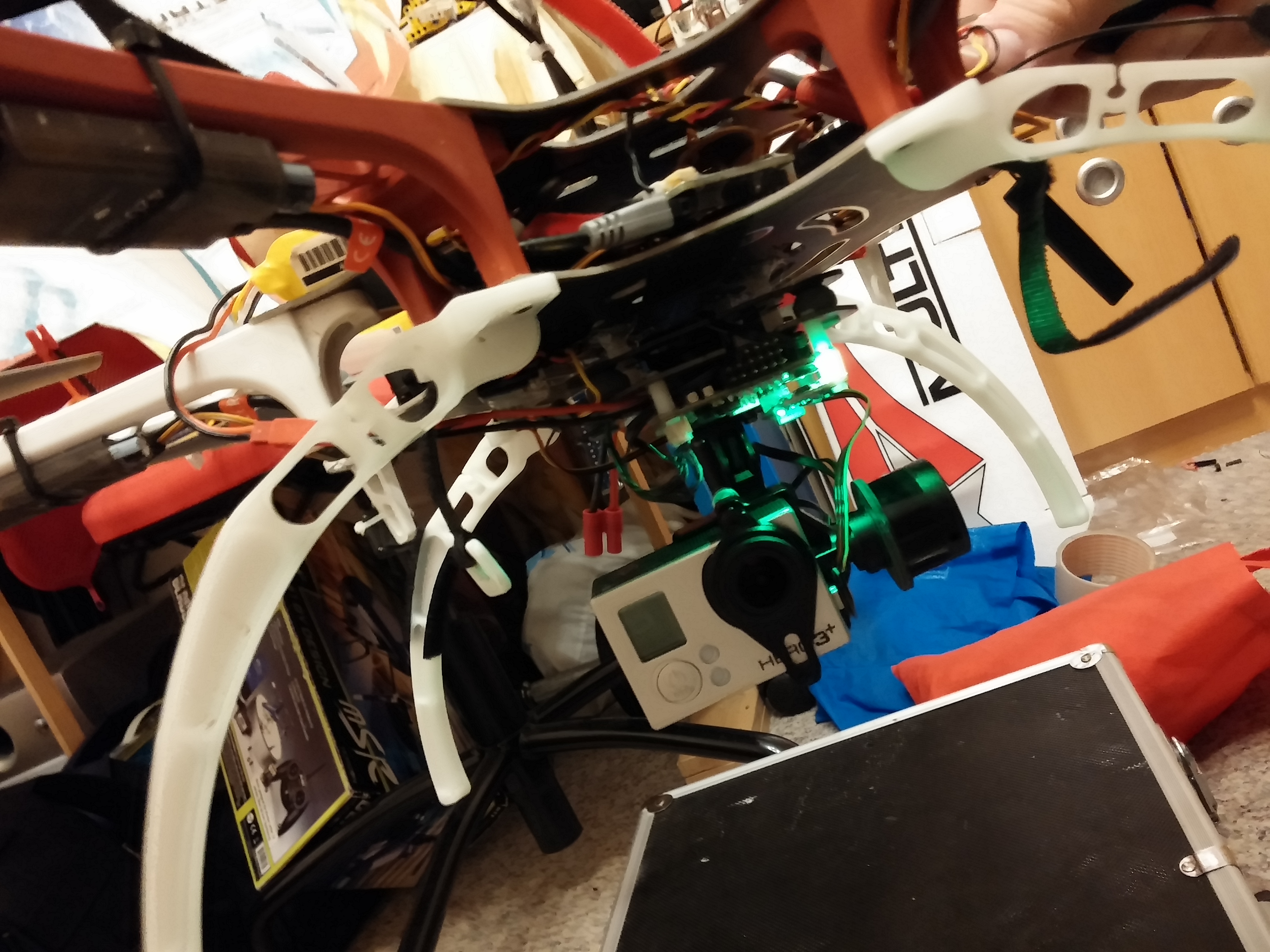
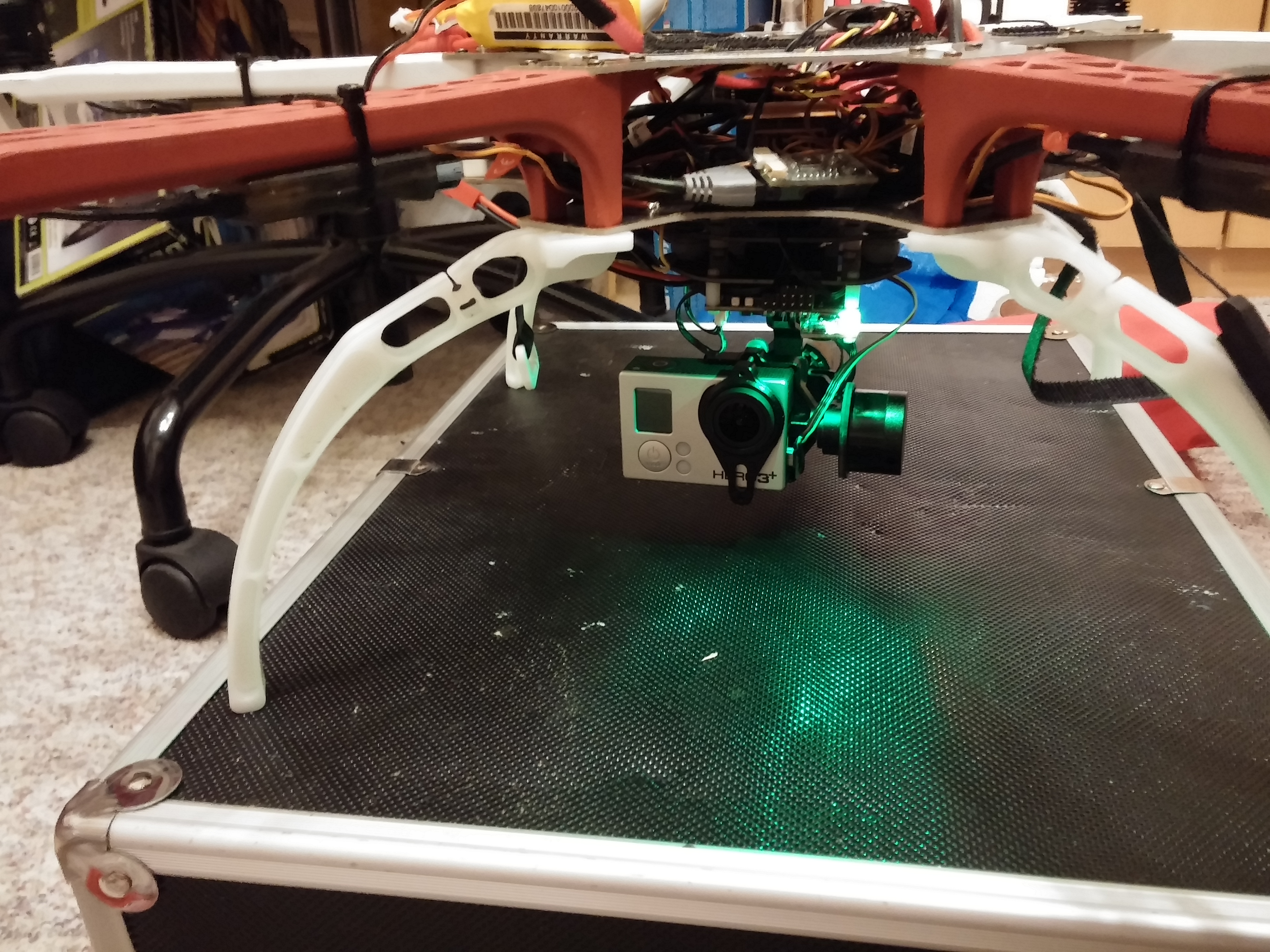
DYS 3-Achs Gimbal + AlexMOS-Board vom HK. Strom dran, geht. Fehlt nur noch die Anbindung an die Fernsteuerung.
So kommt die GoPro auch mal in die Luft.
Freigeschnitten:

Fertig:

Unten wird die Lücke aufgefüllt:

Eingelegtes Rohr:

Heißdraht ist der beste Freund des Styroflieger-Bastlers:

Der Junsi-Lader ist auch eine Heißdraht-Stromquelle – funzt einfach. Jetzt hat der Projeti endlich seinen Holm aus 5mm Carbonrohr und 8g Harz. Dazu noch diverse Verstärkungen mit Tesa und Tape und ordentlich Heißkleber. Dazu noch einen D4R-II und einen BlueSeries 40A 2-6S ESC. So wiegt er ohne Akku immer noch leichte 458g. An der Taranis noch ordentlich eingestellt – und ja, er wird wieder mit 4S fliegen!!! Der 2845/7-2600kv-Motor gibt das locker her, an APC 5×5 (nur der Regler könnte etwas überfordert sein).
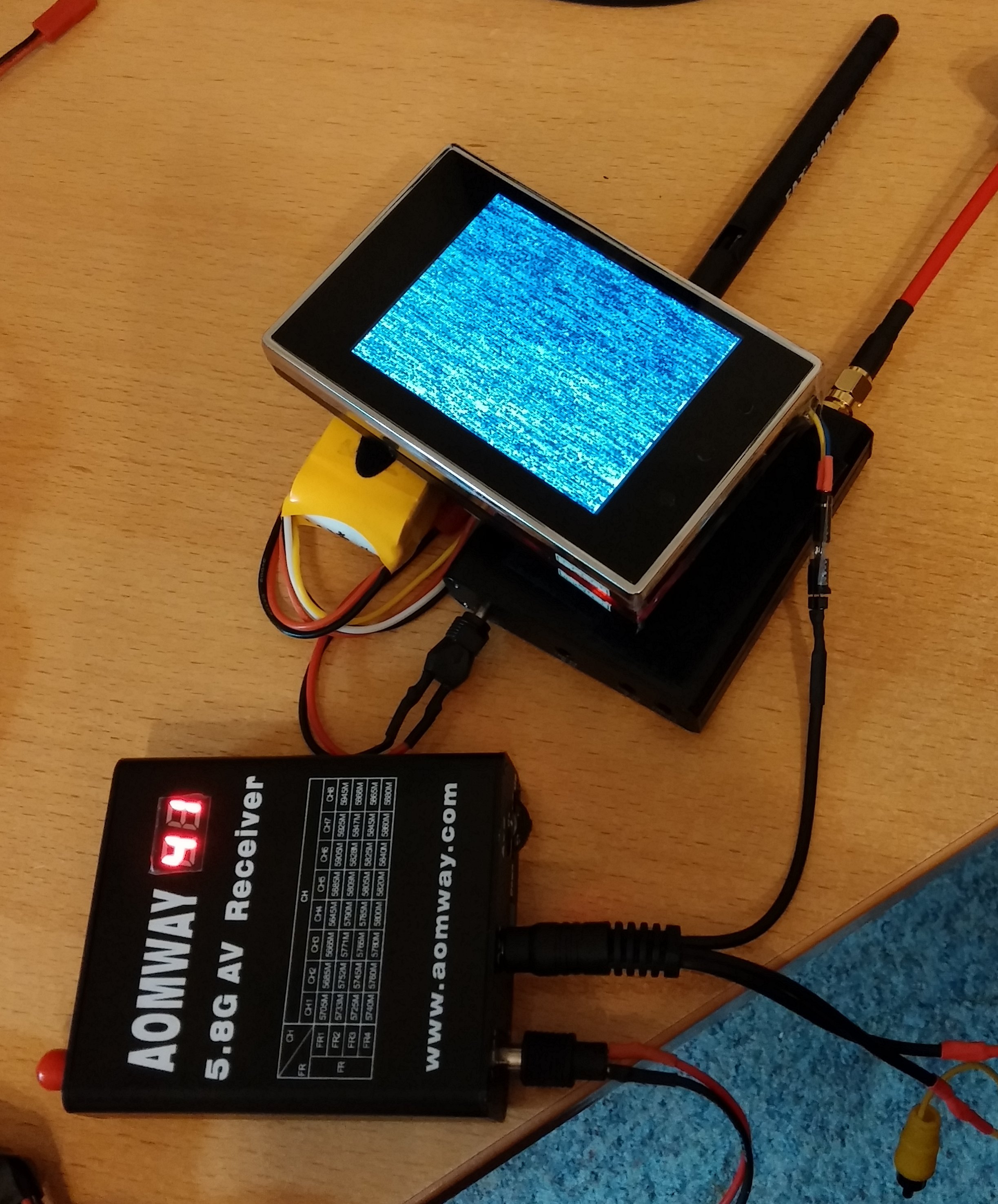
Zu meiner Armada aus 4 Fatshark-Modulen, 3 Boscam RC305 (einer vom Alex), dem FR632 Diversity und diversen Einzelmodulen gesellt sich seit heute der 32ch-Aomway mit integriertem DVR.
Das hat Vorteile und Nachteile:
+ Es gibt keinen Bluescreen auf Ausgang AV1, der DVR erzeugt dann ein gültiges Signal.
+ Er zeichnet 640×480 AVI files auf.
+ Die Dateien sind recht klein bei guter Qualität.
– Das Bild ruckelt leicht.
– Die Aufnahme muss manuell gestartet werden.
– Und: man muss die Aufnahme stoppen, bevor man den Akku trennt!
Man kann auf AV2 das unverfälschte Signal abnehmen. Feine Sache! Ob er wirklich so gut ist, wie in den Foren behauptet – ich werde es herausfinden!
322g ohne Akku und ohne Kamera. Mit einem 4s 1400 Multistar Racing Akku wiegt er dann 477g.

Bestückt ist er mit 5×4.5 Bullnose HQ-Propellern.
So, ich hab nun auch das MW OSD 1.3 probiert – ging nicht.
Das Anysense mit MAVLINK nimmt offenbar nur das ARDUCAM OSD (Config_OSD_20).
Dazu braucht man nur noch MinimOSD_20.hex und die Config.f550_2


Die große HK-Cybersaleaktion zeigt Auswirkungen – 36€
Damit der Schwerpunkt auch nur in die Nähe der Sollposition wandert Download PuTTY brew , muss ein 3s 610 LiPo rein 🙂
Dazu ein DIY-BEC und ein Spektrum-Empfänger.
Der Flieger selbst ist mit wenigen Handgriffen gebaut: Winglets freischneiden und anpappen. Dazu noch Ruderhörner nachkleben, denn die sehen nicht sehr vertrauenswürdig aus. Das Schaum-Material sieht glatt und edel aus. Wirkt sehr steif. Die Decals sind schon aufgebracht und die Servos verbaut und gut eingestellt. Die Haube hat eine Nase zum Einhängen und zwei Magnete.
Oben: AOMWAY
Unten: Fatshark
Fazit: Faszinierend
Teksumo EPP-Nurflügel ca. 33€
Motor: Tigermotor MN2206-2000 20,90€
ESC: Pichler 12A (entspricht HK BlueSeries 12A) ca. 8€
Propeller: Aeronaut 8×4.5″ CamCarbon light (Multicopter-Version) 4,02€ (gibt’s auch bei SR electronic gegenüber), APC 8×5″ oder HQ-Prop geht bestimmt auch.
Akku: 2S 4000 Zippy compact 25C ca. 15€
Empfänger: nach Wahl (bei mir D4R-II ca. 20€)
Servos: 2x HKSCM9-6 ca. 3€
Akkustecker nach Wahl
Klettgurt (dabei) und selbstklebendes Klett nach Wahl
Glasgewebeverstärktes Klebeband 50mm breit
Klebstoff: Sekundenkleber und Heißkleber
Bei den Hobbyking-Artikeln kann man durch Abwarten einen kleinen Preisnachlass bekommen!
Optional für FPV:
Videosender nach Wahl, muss 2S fähig sein (Spannung bis runter auf 6V!)
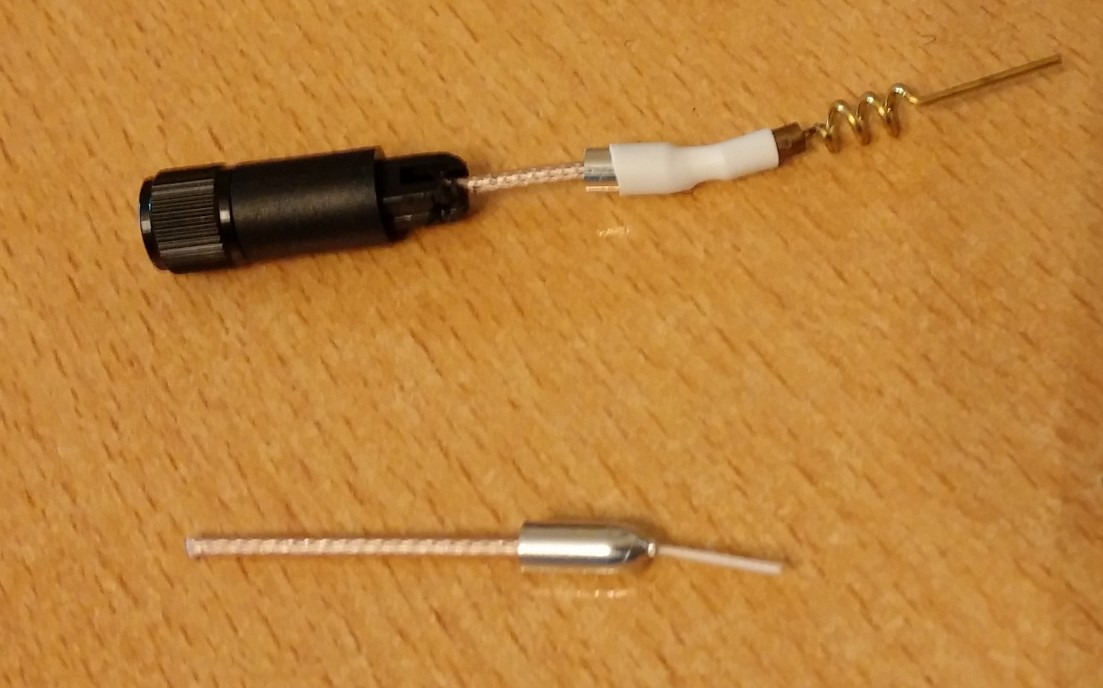
Antenne nach Wahl, z.B. Spironet.
Kamera: 600TVL Sony SuperHAD (Foxeer XAT600M) ca. 35€ (unbedingt mit 2$ Shipping bestellen, sonst dauerts ewig), und mit 2.8 Linse, IR-Block und PAL!
OSD: Tarot OSD 22,26€
PDB: DIY, einfach eine mit Kupfer beschichtete Platine mit dem Dremel cutten, so dass zwei Kupferflächen entstehen.
Ortungssystem, z.B. Loc8tor.




Der Frame ist schon teilweise gebaut – für die Regler brauch ich mehr 30mm Schrumpfschlauch.
PDB gefräst, XT60 und 5V Power dran, Verkabelung und OSD-Kabel gelötet. Fehlen noch die Regler aufs PDB.
Drehrichtungen eingestellt.
Fehlt nur noch die SP Racing F3. Die braucht natürlich betaflight, Telemetrie, OSD, LEDs, OneShot, Spannungsüberwachung, Beeper und natürlich den D4R-II und die 4 Regler.
Dann muss nur noch die Kamera in/an den Turm und eine Antenne mit Winkel an den Aomway.