Der 30-Euro-Autopilot – man nehme:
- Mini NAZE32
- GPS-Modul UBLOX NEO M6N oder neuer, das GPS auf UBX-Protokoll, 5Hz und 57600 baud einstellen
Und diese Software von Patrik Emilsson.
Dazu noch einen Flieger deiner Wahl und einen Empfänger mit PPM (man kann übrigens X4R(SB) mit einem Jumper an CH2-3 zur PPM-Ausgabe an CH1 bringen).
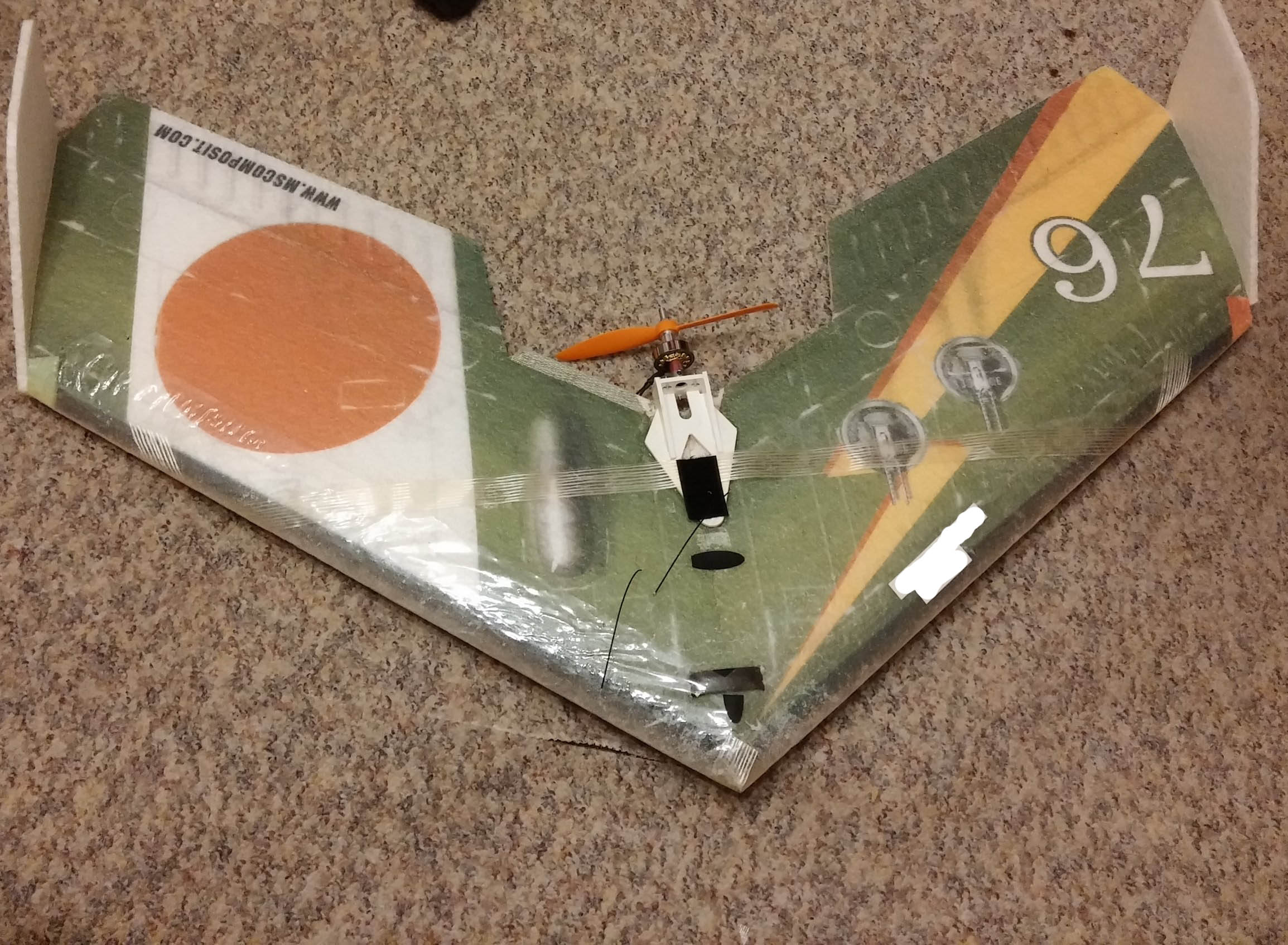
Von oben schaut er noch ganz normal aus:
Erst unten sieht man die Modifikation (das ging auch recht fix):
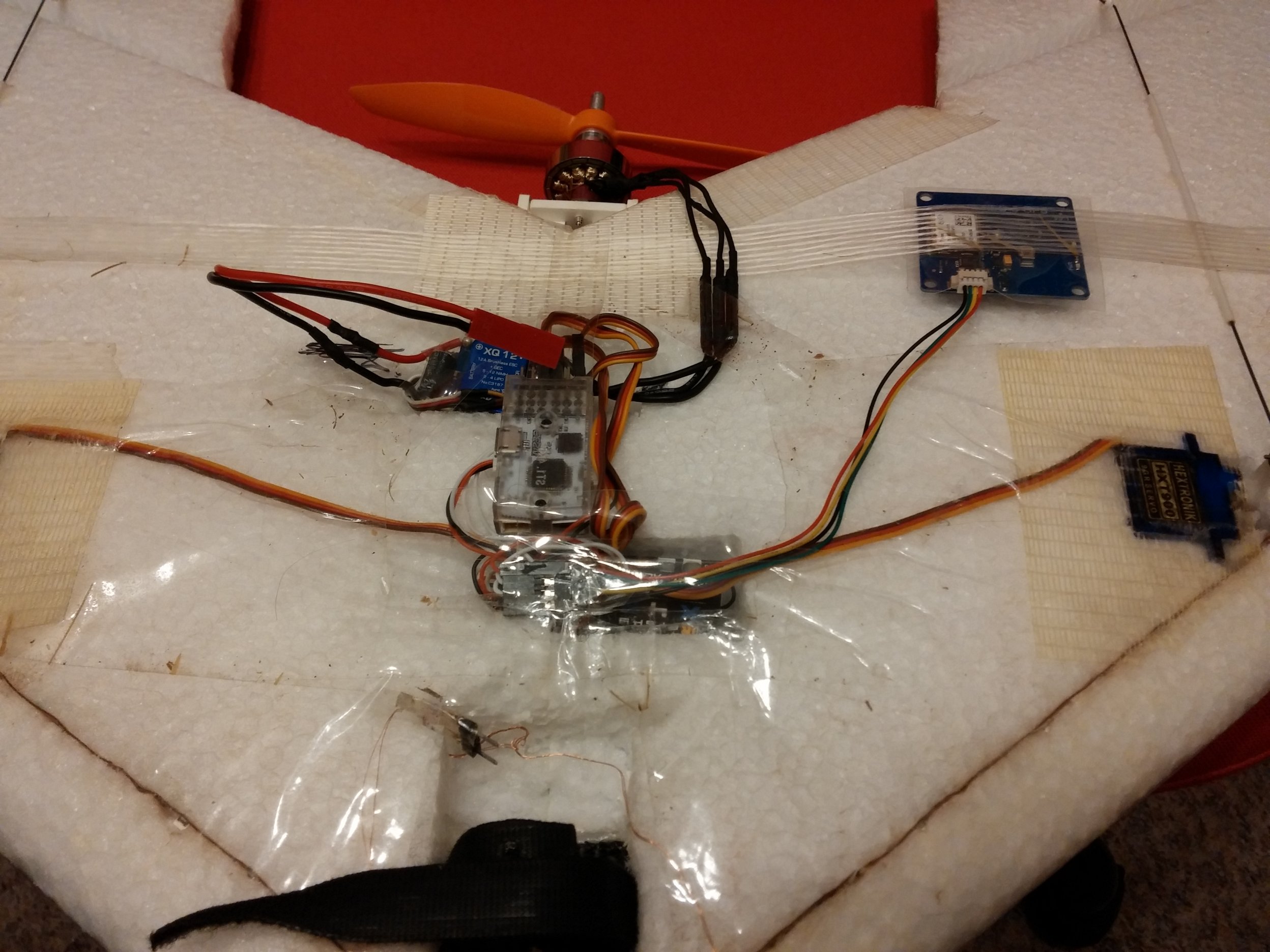
Das Einstellen geht auch recht fix. Fliegerart mit preset X laden, Empfänger und GPS angeben, Servorichtungen anpassen, fertig. Und natürlich alle Regel- und Steuerrichtungen kontrollieren!
Und noch einen Hinweis:
Die mini NAZE32 hat an M1 und M2 Motoren PuTTY download , die Servos starten ab M3! GPS kommt an das RX/TX vom 8-poligen Anschluss (Pin5=Tx, 6=Rx), die 5V kommen vom 4poligen. Das ist Setup #B aus der Anleitung.