Teksumo EPP-Nurflügel ca. 33€
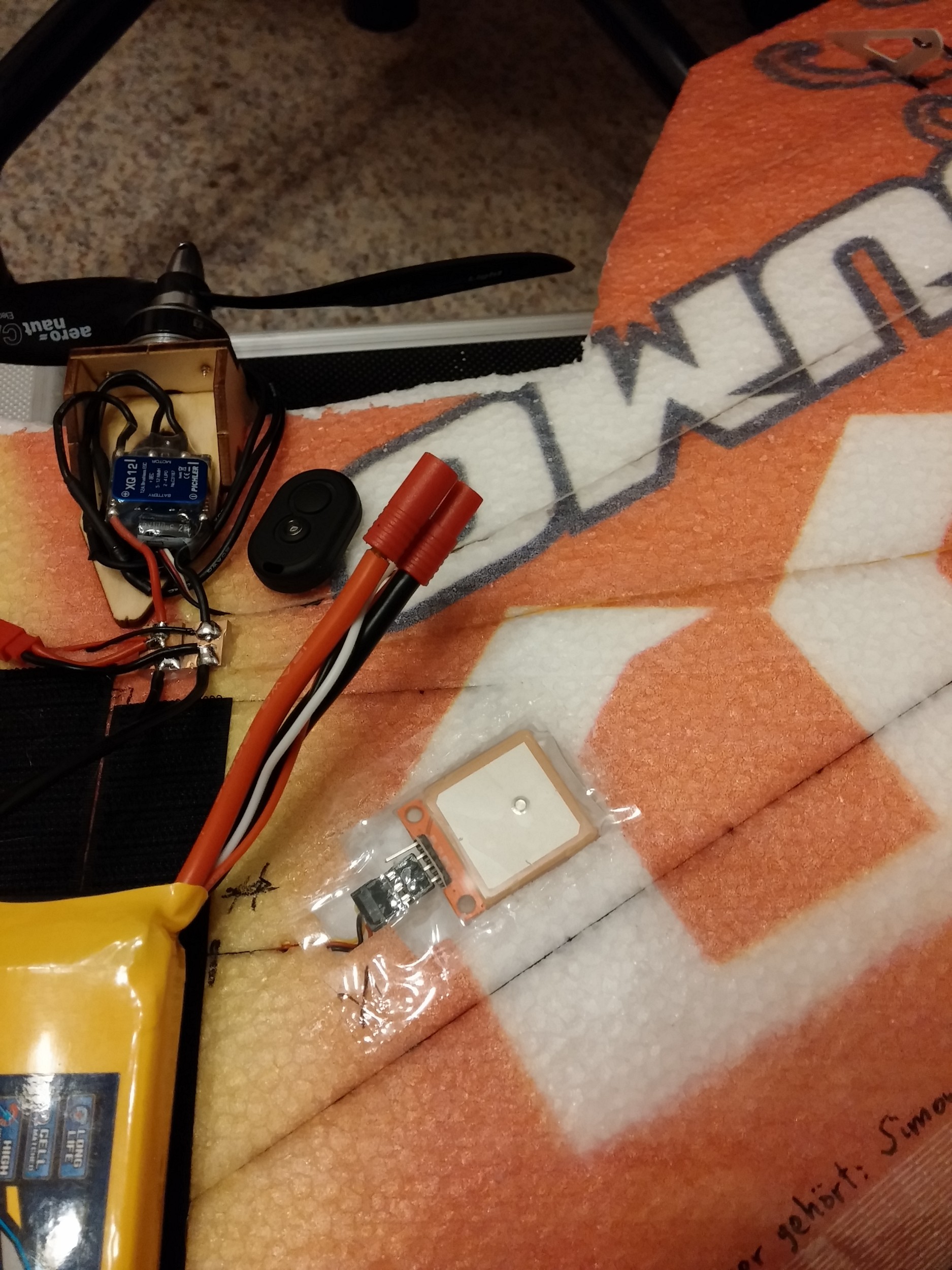
Motor: Tigermotor MN2206-2000 20,90€
ESC: Pichler 12A (entspricht HK BlueSeries 12A) ca. 8€
Propeller: Aeronaut 8×4.5″ CamCarbon light (Multicopter-Version) 4,02€ (gibt’s auch bei SR electronic gegenüber), APC 8×5″ oder HQ-Prop geht bestimmt auch.
Akku: 2S 4000 Zippy compact 25C ca. 15€
Empfänger: nach Wahl (bei mir D4R-II ca. 20€)
Servos: 2x HKSCM9-6 ca. 3€
Akkustecker nach Wahl
Klettgurt (dabei) und selbstklebendes Klett nach Wahl
Glasgewebeverstärktes Klebeband 50mm breit
Klebstoff: Sekundenkleber und Heißkleber
Bei den Hobbyking-Artikeln kann man durch Abwarten einen kleinen Preisnachlass bekommen!
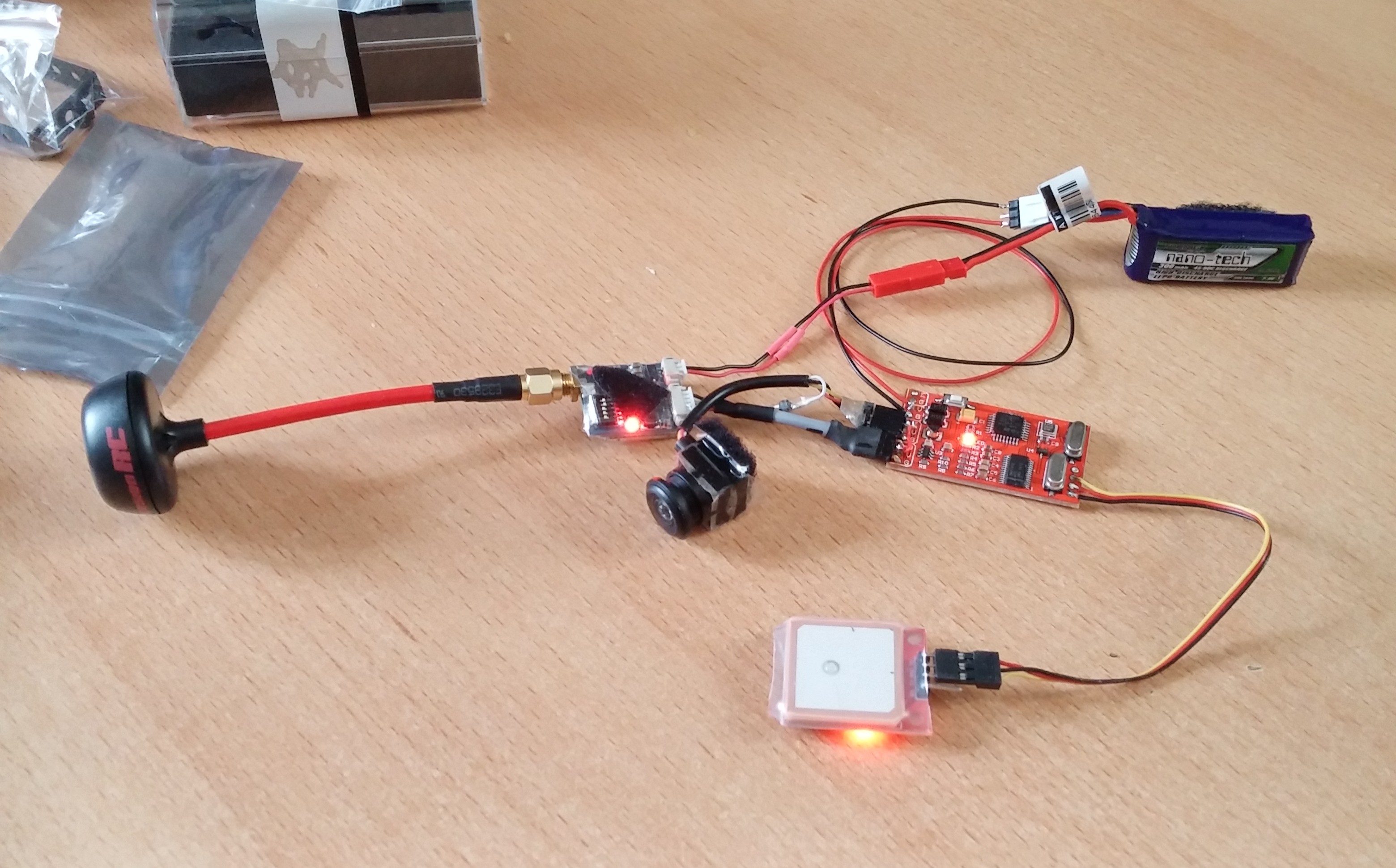
Optional für FPV:
Videosender nach Wahl, muss 2S fähig sein (Spannung bis runter auf 6V!)
Antenne nach Wahl, z.B. Spironet.
Kamera: 600TVL Sony SuperHAD (Foxeer XAT600M) ca. 35€ (unbedingt mit 2$ Shipping bestellen, sonst dauerts ewig), und mit 2.8 Linse, IR-Block und PAL!
OSD: Tarot OSD 22,26€
PDB: DIY, einfach eine mit Kupfer beschichtete Platine mit dem Dremel cutten, so dass zwei Kupferflächen entstehen.
Ortungssystem, z.B. Loc8tor.