

Geht doch!
Die Mobius lag wohl schon eine Woche oder länger auf der Post (die kam aus NL) – hab halt keine Karte gesehen…
Geht doch!
Die Mobius lag wohl schon eine Woche oder länger auf der Post (die kam aus NL) – hab halt keine Karte gesehen…

Helmut kam später auch dazu – mit seinem Racer.


FPV mit FunCub – das war toll!

So sah der Himmel aus – eine bombastische Stimmung!
https://vimeo.com/141279375

Neuer Controller – flip32+ (der alte CC3D flog extrem zappelig und hatte Störungen auf den Sensoren)
Cleanflight drauf und neu eingestellt
X4R-SB gepatcht (SBUS an Flip32 darf nicht invertieren – daher extra Kabel vor den Inverter dran gelötet)
KISS auf OneShot umgelötet
Piepser gebastelt und angebracht
Fazit: Fliegt jetzt anständig! PuTTY SSH connection timed out


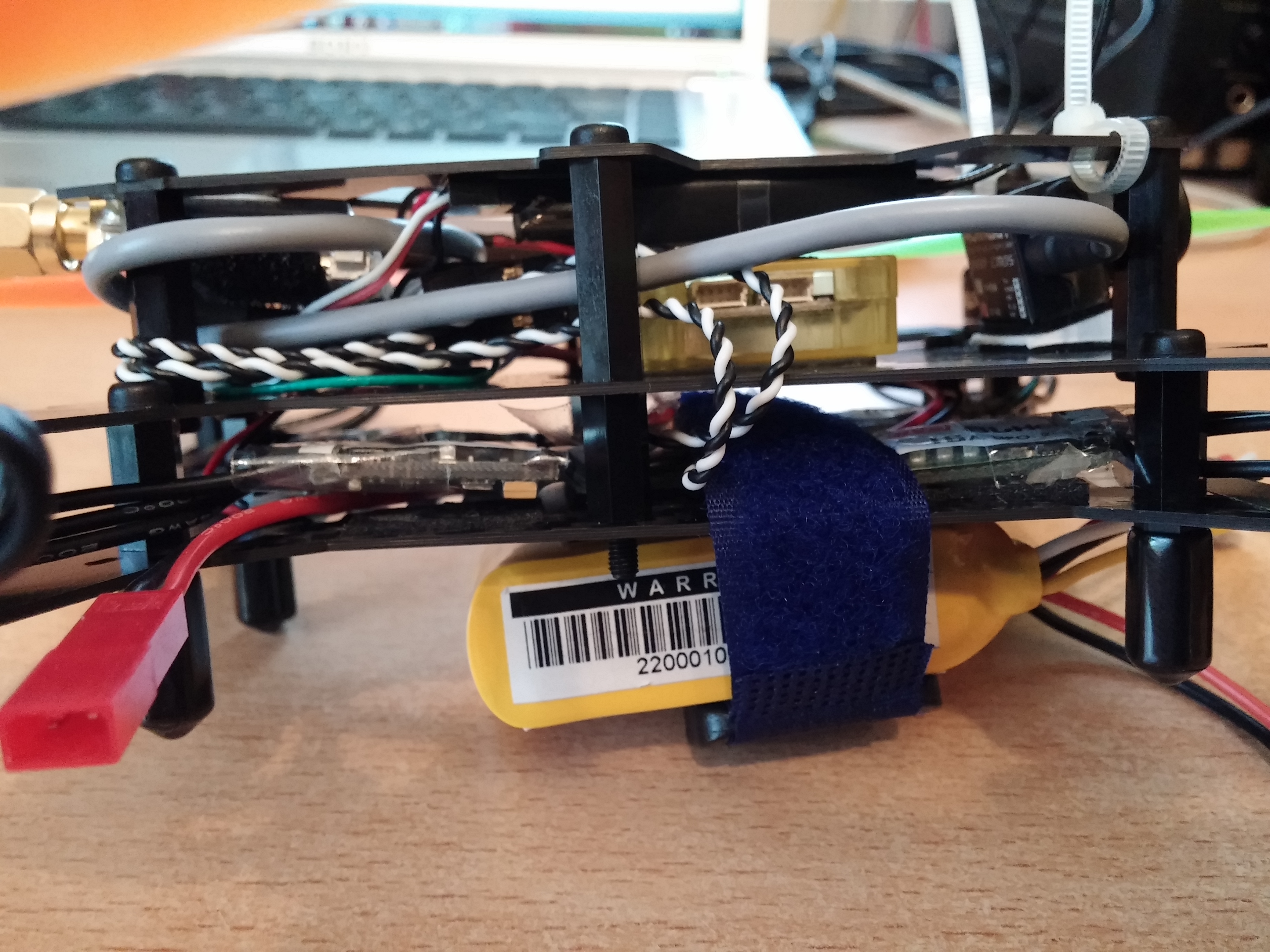

Voll aufgebauter Eachine Q200
175g ohne Akku (Akku 50-90g, 3s)
5A Schwebestrom
Fliegt mit Default PIDs (PID controller MultiWii 2.3) schon richtig gut.
Bauzeit mit anschließendem Einfliegen etwas über 4h

Man nehme:
1x MinimOSD – flashen auf MAVLINK OSD 2.0 (evtl. geht auch Multiwii-OSD oder Rush/KVTeam r345)
Charset upload nicht vergessen!
Anysense – auch hier den zweiten Port auf MAVLINK konfigurieren!
Und dann noch mit dem Tool den OSD Screen nach Gusto einrichten.

USBasp – für AVR flashen, bzw. AVRDRAGON als universelles Atmel-Tool
FTDI (am besten mit Spannungsjumper) – flexibler USB zu seriell Wandler, flasht z.B. FrSky, OpenLRS, etc.
Arduino pro mini – „Schweizer Taschenmesser“, flasht und konfiguriert auch ESCs uvm.
Bluetooth HC-06 – drahtlose serielle Schnittstelle, z.B. zum schnellen Einstellen von PIDs
https://vimeo.com/136017862
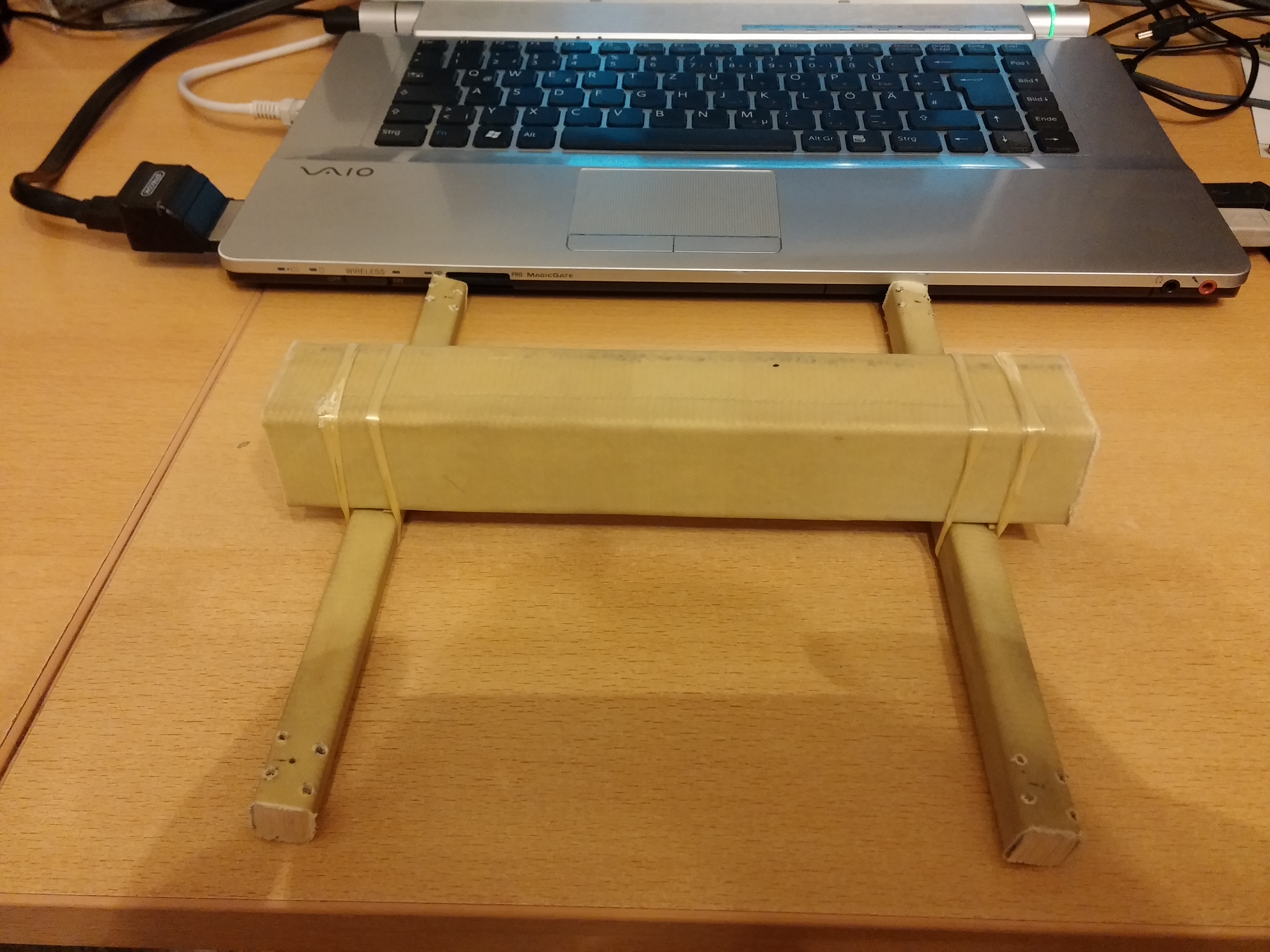
Hier habe ich einen Aramid/Kevlar-Frame vom freundlichen Rahmenbastler aus dem FPV-Nerd-Treff. Für 45€ bekomme ich also einen Kevlarrohr-Frame mit sagenhaften 41g!
Die Motoren sind 10° nach vorne geneigt, für mehr Speed. Die Arme sind mit Balsa gefüllt um die Belastbarkeit zu erhöhen. Bohrungen für DYS1806 sind auch gemacht worden. Die Arme sind mit Kevlar-Rovings an den Rumpf geleimt und mit Sperrholz für die Neigung unterlegt. Ich habe hier die Tiefdecker-Version. Dieter bestellte die Hochdecker-Version, bei der die Arme oben liegen. Da der Frame doch recht symmetrisch ist – macht das keinen großen Unterschied 🙂
Die Haptik hat was von Papierflieger. Und er wird auch keinen Schönheitswettbewerb gewinnen (macht beim Racen ja nichts). Ich hoffe ja, dass das meiste an Technik im Rumpf verschwinden kann. Der Akku wird dann unten oder oben sein und einfach angegurtet. Die Mobius/Runcam HD kann dann oben vorne drauf. Regler und Motoren auf die Arme, FPV, RX und FlightControl verschwinden im Rumpf. LED-Streifen unten an den hinteren Arm. Da das Material HF-unkritisch ist, können evtl. sogar die Antennen im Rumpf bleiben! Das wäre hier ein echter Super-Knaller! Das Ganze dann im Rohr zusammen zu pfriemeln wird aber lustig!
Mit dem Rumpfrohr-Innendurchmesser von knapp 34mm passen leider die normalen FlightControls nicht rein. Da geht dann nur der CC3D Atom. Für den muss ich dann auch einen Schlitz fräsen, damit der USB zugänglich ist.
Das Kevlar hat nicht die Steifigkeit von Karbon. aber durch die Rohrkonstruktion und die höhere Wandstärke ist der Frame doch verwindungssteifer als die ZMR und Diatone-Voll-Carbon-Frames!
Ich bin gespannt!