für 39€ gönnte ich mir die Ultra-Low-Cost FPV-Platform „Ufo 998V2“. Er wackelt leider etwas beim Ausregeln. Aber er kommt locker mit dem Extragewicht zurecht.


für 39€ gönnte ich mir die Ultra-Low-Cost FPV-Platform „Ufo 998V2“. Er wackelt leider etwas beim Ausregeln. Aber er kommt locker mit dem Extragewicht zurecht.
So, hier mein nächstes Projekt: Zum Slap-On-FPV braucht es auch einen Empfänger. Einen 3.5″-Bildschirm habe ich schon bestellt, bis der kommt, dauert es noch. 
Dieses Projekt erlaubt es, über SPI einen RX58xx anzusteuern, um so 32ch und RSSI-Scan zu erhalten. Eine Bildschirmausgabe ist integriert! Damit kann man dann zwischen OSD und FPV-Bild umschalten. Und genauso werde ich es auch bauen – einfach den RX5808 mit dem Arduino ins Gehäuse quetschen, dazu zwei Taster und ein Umschalter und eine 5V-Versorgung mit 3s – Fertig. Interessant: Beide RX (5808-Modul vs. RC305) kommen ohne Antenne bis ins Schlafzimmer durch 4 Steinwände und nur leichtes Rauschen im Bild. Erst wenn ich dazwischen gehe, kommen stärkere Störungen.
Für den Acro-Copter:
Für den FPV-Copter:
Allgemeines Zubehör:

Und hier endlich die Inbetriebnahme des Pollin XGA-Displays mit Touchscreen: Es ist FPV-tauglich, d.h. es rauscht erst kräftig, bevor das Bild weggeschaltet wird. Die Bildqualität ist gut. Der aufgeklebte Touchsensor macht einen leichten Kontrastverlust. Ich hab noch nicht herausgefunden, wie man es von 16:9 auf 4:3 umschaltet…


Neue Carbon-Propeller für die MN-Serie-Motoren. Sie sind einigermaßen gut gewuchtet (aber natürlich leicht und hart und brechen schnell). Einen habe ich gleichmal am Stuhl angeschrabbt. Gut, macht nicht viel, ich hab 3 Sets gekauft.
Man kann sie ganz normal mit Tesa auswuchten.


 Der Antrieb: Ein 3s-Akku!!!
Der Antrieb: Ein 3s-Akku!!!
Die Leds: vom DX.com $4.99 each.
DIY-Klappmechanismus, mit Haltemagnet oben. Fertig! Strommessung: Genau 1A an 11V (Ein Streifen sollte eigentlich schon 18W haben und das sind zwei parallel geschaltene Streifen!)
Update:
Jetzt habe ich noch einen China-LED-Controller dazwischen, damit kann ich die Lampe an/ausschalten, dimmen (und natürlich in den verschiedensten Mustern blinken lassen)
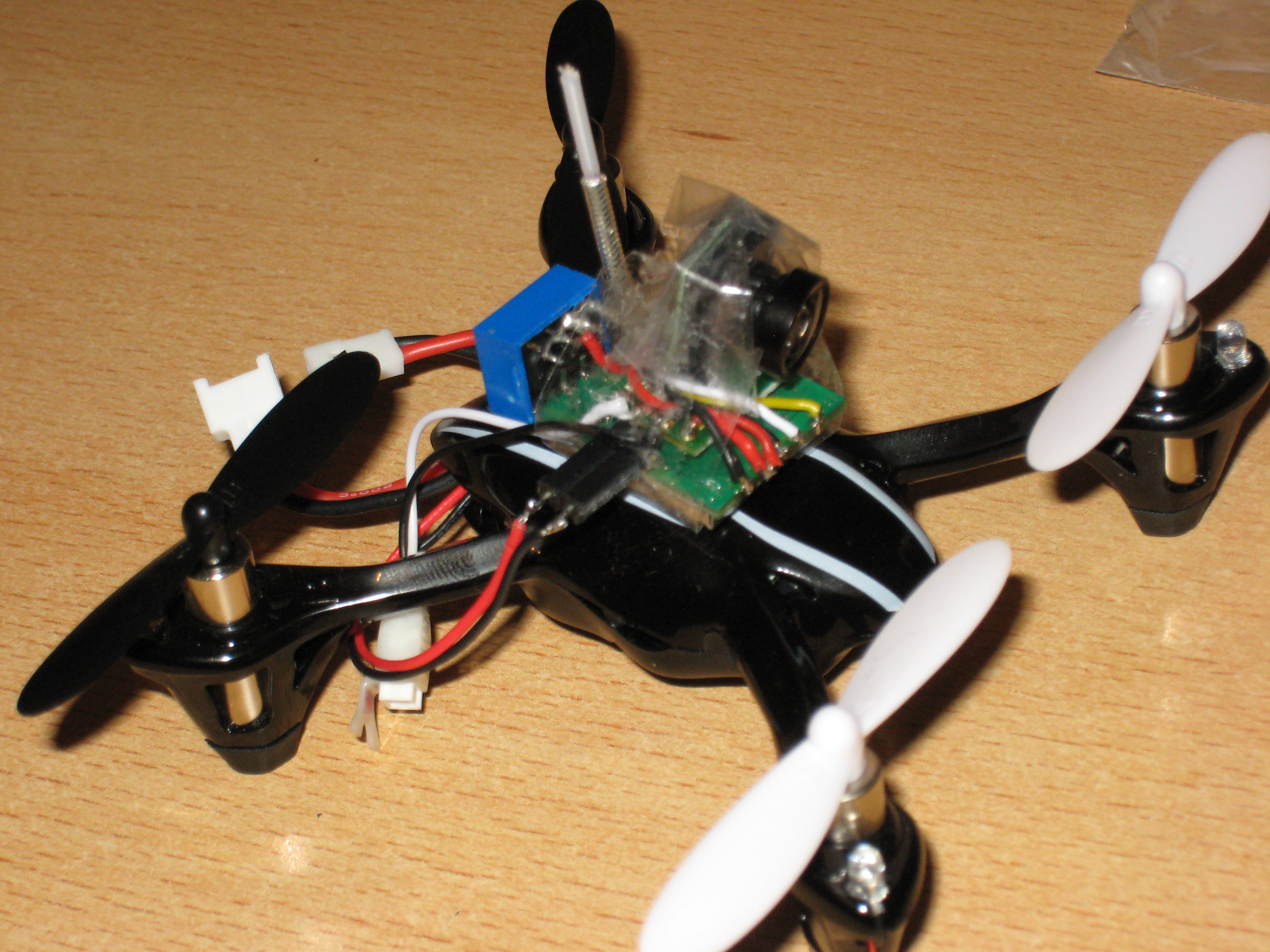

Der „größere“ Nano-Quad ist stark genug, ca. 8g extra zu wuppen 🙂
So flog ich in meiner Wohnung rum, in die Küche und zurück. Die große Reise mit FPV. Aber so ist der Spaß echt portabel!
Ungefiltert stören die Motoren irre das Bild. Daher noch eine 100µH-Drossel und 100µF Kondensator dran, Bild wieder gut.
Jetzt bin ich nochmal geflogen – ich brech ab, das ist zum Kaputtlachen! Ich bin glatt gegen die Lampe im Flur gestoßen, dann an die Wand gekommen und auf den vorderen Mäusekäfig gestürzt. Die Antenne brach ab, war schnell behoben. Ich werde noch so ein Modul bauen, mit flexibler Antenne 🙂
Hab ihn nochmal bis ins Schlafzimmer geflogen, wo ich dann in meinen Wäschehaufen stürzte. Ein Versuch, die Antenne mit Heißkleber zu fixieren, zeigte, dass der Kleber HF gut ableitet – kein Bild mehr! Also Kleber wieder weggepfriemelt!
So, heute war der neue WarpQuad dran!
Ich flog ihn auf der Wiese in Eichstätt.
Was kann ich sagen? Ein sehr agiler aber auch kontrollierter Copter. Ich flog nicht nur vor und zurück oder Kreise, nein, ich flippte in alle Richtungen. Zuerst war er viel zu schnell und ich machte beinahe eine Bruchlandung! Der dreht ja mit 3 Flips/sec! Mit 70 und dann 80 auf den Rates war er zahm. Ich flog dann auch wilder, so mit Flippen dicht über dem Boden und dann steckte er auch bald im Rasen. Das kostete einen grünen Propeller. Egal, ich hab mehr davon. Und es macht irre Spaß! Bei Vollgas schnalzt auch der WarpQuad in den Himmel. Aber der CP1 ist definitiv schneller (und das auf erst 3s)! Die 6×4.5 sind halt für die Sunnysky etwas groß…
Und der Rettungsmodus? Schnalzt brutal wieder gerade, wenn ich den Schalter betätige! Aber dicht über dem Boden kann ich gar nicht schnell genug schalten…
Und der Mag/Baro-Modus? So etwas hab ich noch nicht gesehen: Im Fall bei fast null Gas auf Baro schalten: Der Quad reißt das Gas auf und federt sofort wieder hoch. Der P-Wert ist wohl etwas zu groß. Aber nach dreimal schwingen lockt er die Flughöhe ein. Und der erste Überschwinger sind keine 50cm Weg! Irre! Da kann ich im Ernstfall den Copter in der Luft stoppen – egal wie, wo, wie schnell und in welche Richtung!
Den defekten Propeller tauschte ich noch vor Ort und flog weiter. Insgesamt zwei Akkus, etwa eine halbe Stunde.
Zuhause flog ich dann noch den Heli nano CPX, den wollte ich noch testen, ob das Zappeln und Ausbrechen besser wurde. Mei, kraftlos, zappelig (aber besser als das letzte Mal). Abfangen kurz über dem Boden – vergiss es! Da darf ich keinen Acro-Quad vorher fliegen 🙂
Und dann spendierte ich noch dem Slap-On FPV einen Stepup/down 3.3V. Damit das Teil nicht durchbrennt. Und ich alles ohne extra LiPo anhängen kann – auch einen WarpQuad 🙂 !!!
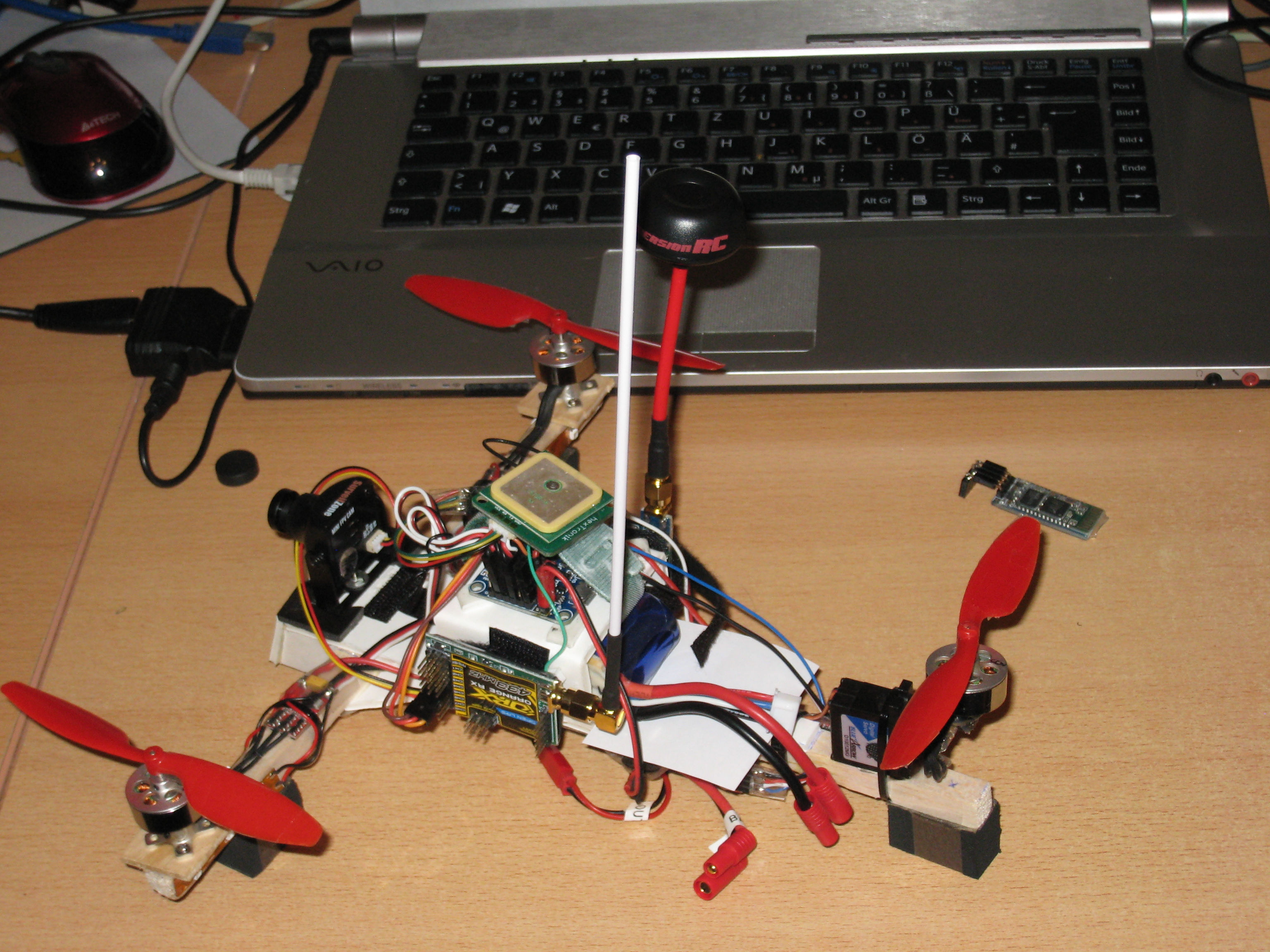
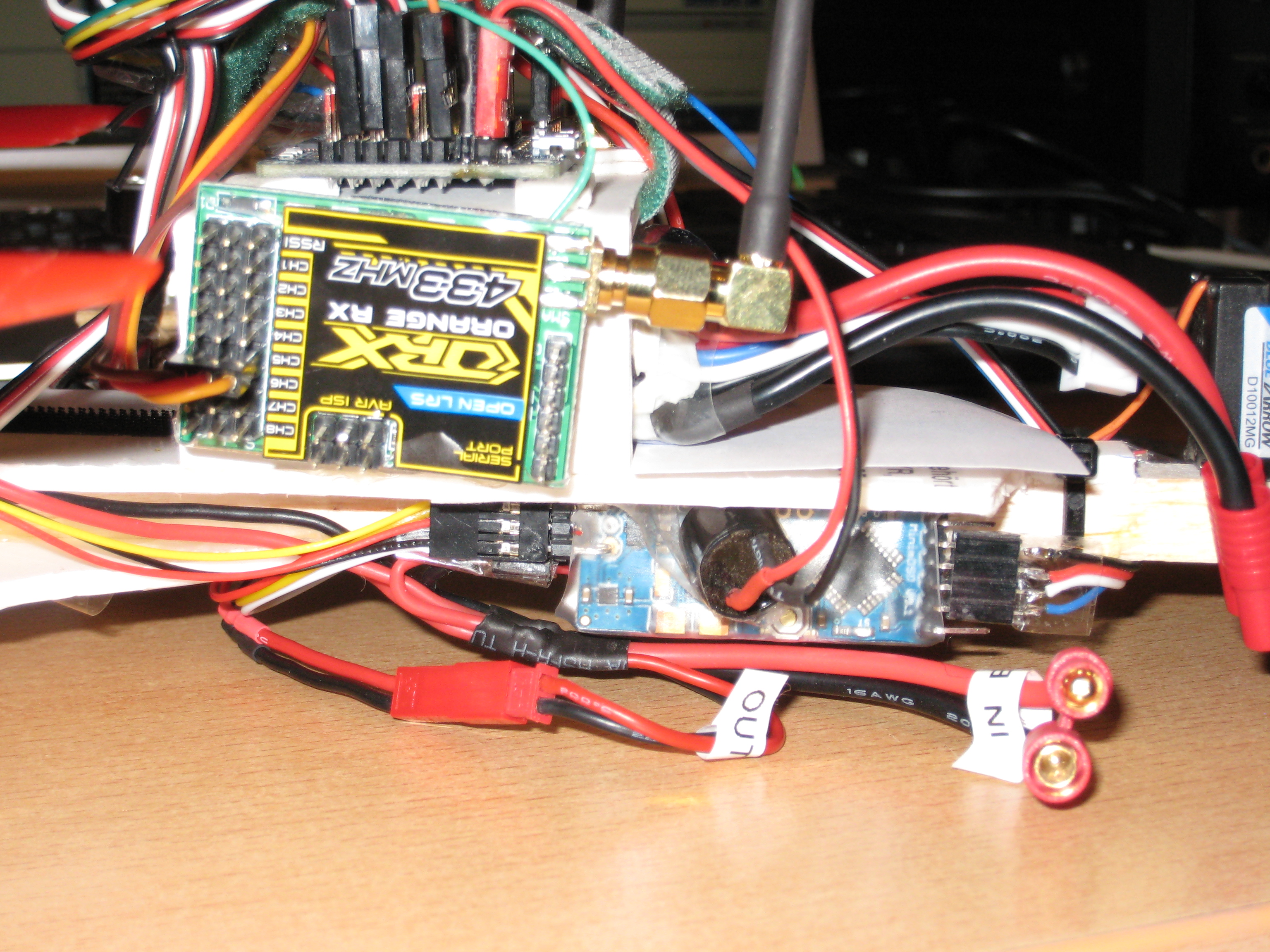
Der RaceTri ist meine kleine aber feine Testplattform. Fliegt einfach. Er wiegt mit dem 800mAh 3S Akku genau 300g. Bestückt ist jetzt so ziemlich fast alles was geht: GPS, 10DOF Naze32/Flip32+ mit CleanFlight, Beeper, MinimOSD, OpenLRS, Sony SuperHAD 2 600TVL, Mini 32ch VTX mit Spironet. Fehlt nur noch ein Current-Sensor.
Ich muss jetzt Diverses testen: Wie etwa GPS-Hold und RTH, sowie Failsafe.
Das Minim läuft mit KV-Team-Mod. Geht einfach. Sogar der Zeichensatz bleibt drin (habe mit 8V auf VTX-Seite programmiert). Dann einfach die zwei Lötbrücken oben und unten geschlossen und den VTX/Cam-Anschluss +12V abgetrennt. RSSI (kombiniert) wird über das LRS an Channel 9 eingespeist und vom Naze32 verarbeitet. Das OSD habe ich auch nur draufgemacht, weil das LRS mir (noch) keine Telemetrie meldet, zugunsten Reichweite.
