Fricklers „Light-Flight“


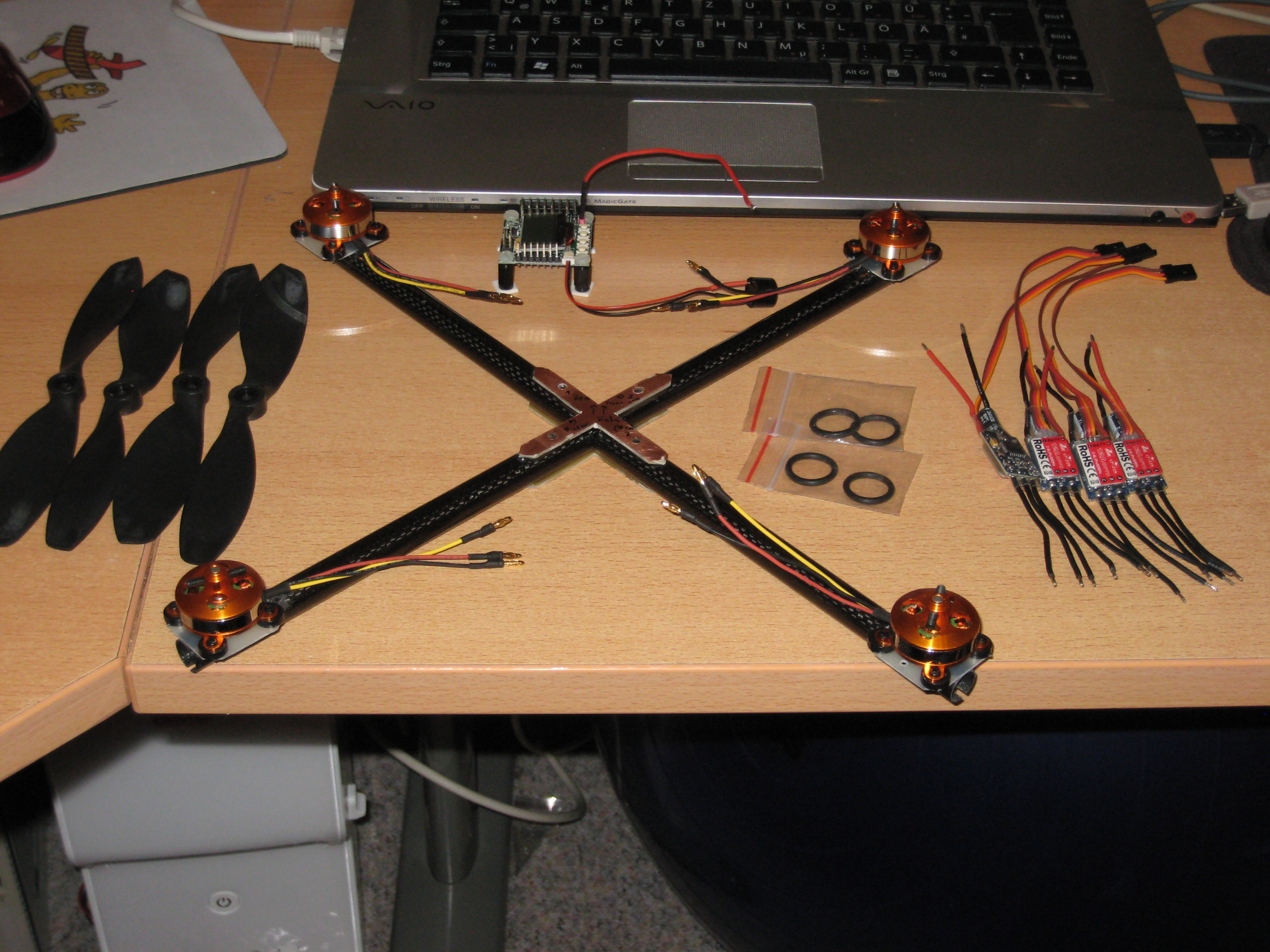
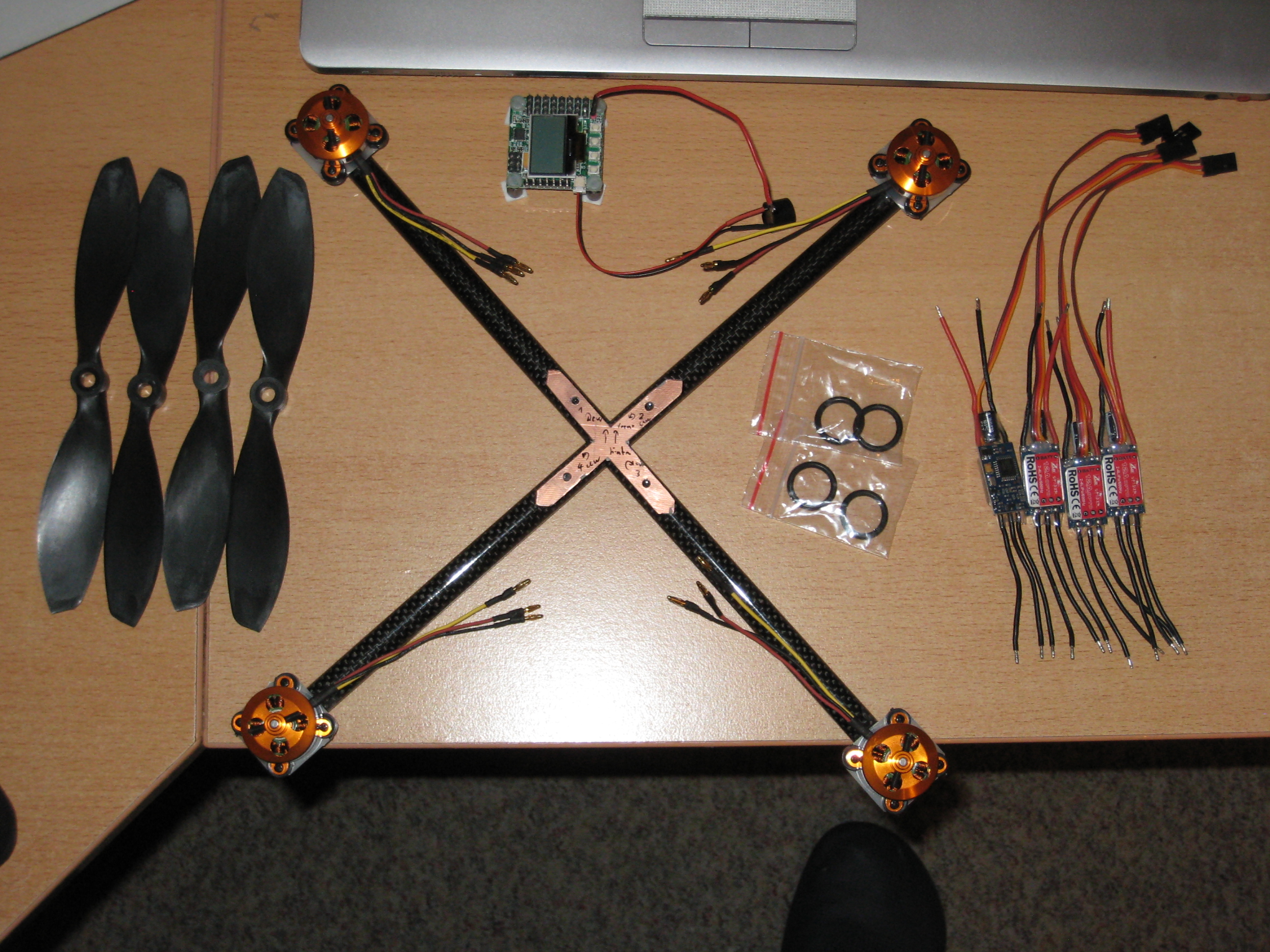
Der Rahmen wiegt etwa 35g! Er besteht aus Carbonrohren mit Platinenzentralstück und angeharzte Platinen-Motorträger.
Dazu 4 RCTimer 2204 – 1400kv Motoren (~23g), 4 ZTW Spider 12A SimonK ESC, 4 HK Turnigy carbonverstärkte 7×3.8 Props, 2s 2200 Zippy Akku und eine Mini KK 2.1.5 Flightcontrol. Rx wird wohl ein DR4-II werden.
Update:
327g mit Akku Zippy 2200 2S, 217g „leer“. Fliegt vom Fleck weg. Ich konnte die PI noch hochsetzen auf P=71/100 und I=20/20. Da geht bestimmt noch mehr, aber das KK ist dann langsam am „Zappeln“. Einfliegen in der Küche – easy 🙂
Die Motoren sind minderwertig. Leider: Die Lager sind schon hinüber ohne, dass der Motor je lief. Das gilt für 3 von ihnen. Die Propsaver-Gewindeschrauben sind nicht mittig platziert und erzeugen gehörige Unwucht (Tesa dagegen, und dynamisch nachgewuchtet). Die Propeller sind „Carbon-infused“ und benötigten nur wenig Tesa. Sie sind recht steif.
Die Regler sind „opto“, aber an den Kabeln ist der rote Draht dran. Ich habe gleich mal Masse und Rot entfernt.


Mangels DR4-II sitzt jetzt erst mal ein D6FR drauf. Was mich auch wundert: Der Copter fliegt erst bei etwas über Halbgas. Das sollte doch laut Frickler erst mit 200g Zuladung sein… ich pack mal schnell Zusatzgewichte dran. Jetzt fliegt er mit etwas über 2/3 Gas. Vielleicht muss ich mal 8×3.8 Propeller dran tun.
Zum Bau selber:
Ich habe ein Rohr in der Mitte zersägt und die Hälften noch um je 6mm gekürzt (weil das Rohr 12mm Durchmesser hat).
Dann aus einseitig mit Kupfer beschichteten Platinenplatten zwei 5cm Quadrate ausgesägt und die zu „X“ geschnitten. Die Stege sind etwa 8mm breit. Das Kupfer dient als „Powerplane“, Plus oben und Minus auf der Copterunterseite.
Die Motorträger sind 3cm-Quadrate aus 1mm-Platinen ohne Kupfer mit den Schraublöchern für die Motoren.
Die Motoren habe ich geölt und mit Propelleradapterringen unterlegt, damit die Welle nicht unten anliegt und die Kabel nach unten raus können. Dann noch mit ordentlich Tesa gewuchtet.
Die ganzen Teile habe ich mit 5min Epoxy verklebt. Die Teile habe ich an den Klebestellen vorher mit Schleifpapier 280 aufgeraut.
Das KK-Board sitzt auf M3-Plastikschrauben in Platinendistanzhülsen, das Ganze klebt mit Doppelklebeband aus Schaum auf dem oberen Kupferkreuz.
An den Platinen ist für Plus angelötet: 4 Regler, Akkustecker, Spannungsüberwachungspin, Pololu 5V „BEC“ und FPV-Anschluss Plus. An Minus dann: 4 Regler, Akku-Minus, BEC-Minus und FPV-Minus. Praktisch, so Platinen im Copterdesign 🙂
Die Regler sind direkt an die Motoren gelötet, da ich keine 2mm-Buchsen mehr hatte. Die Regler sind von unnötigen Kabeln befreit und direkt an die Center-Platinen gelötet. Zur Befestigung dienen Kabelbinder und doppelseitiges Schaumklebeband.
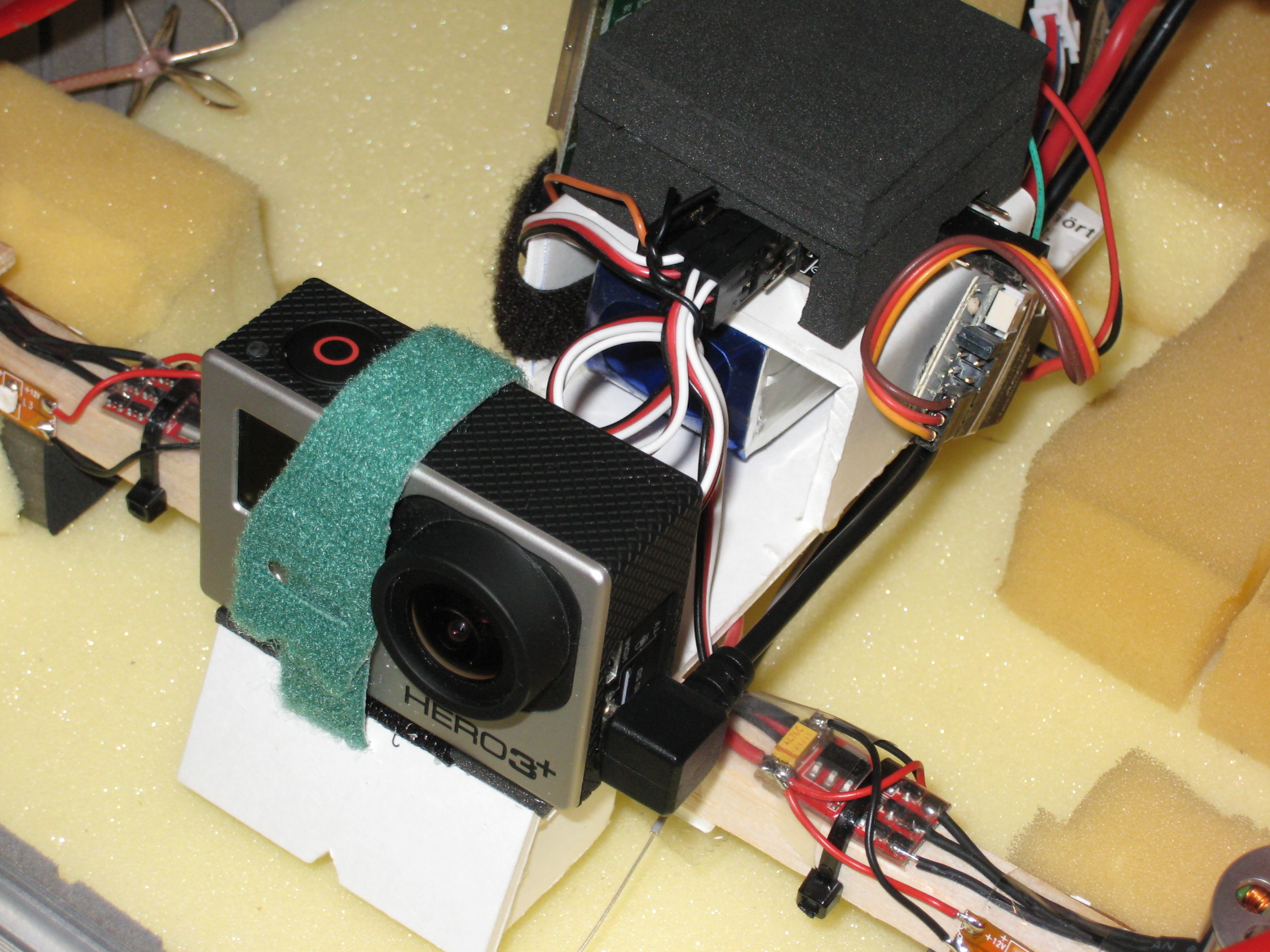
Die Propeller sind auch mit Tesa gewuchtet und mit den beiliegenden Gummis auf den Propsaver-Gewindestangen aufgespannt.
Für den Akku habe ich ein Klettband um die Coptermitte geschlungen und mit dem Schaumklebeband noch eine kleine KAPA-Platte angeklebt, auf der auch Klett ist.
Bauzeit: Zwei Abende, 6-7h gesamt
Kosten:
- 4x Motoren: $39.29
- 4x Regler: 24,52€
- 4x Propeller: $3.92
- 2x Carbon-Rohr: $4.80
- KK mini: $24.99
- 2S 2200 Akku: $9.80
- D6FR: $19.95
- —
- Summe: (Kurs ~1.20 USD/EUR) ~110€ (ohne Versandkosten)
Wenn man einen OrangeRX nimmt, kommt er unter 100€.
Was kann besser werden: Andere Motoren, kleinerer Empfänger. Es heißt ja nirgends, dass dieser Copter „light“ bleiben muss. Größere/schnellere Motoren dran, mit 3S 1300, und er wird zum Bolzcopter 🙂
Oder wo könnte man noch Gewicht sparen? Kabel Empfänger-KK, Empfänger tauschen, leichtere Propeller aus dünnem Vollcarbon, leichterer Akku, Akkustecker kürzen…