Neuer Copter:
Hin

(Beim dritten Mal Gas geben schraubte sich ein Propeller im Flug ab, rotierend in die Wiese gefallen: Front-Arm gespalten. Sein Flugverhalten war auch nicht so toll: Wobbelt immer ganz leicht – trotz gewuchteter Motore und Props!)
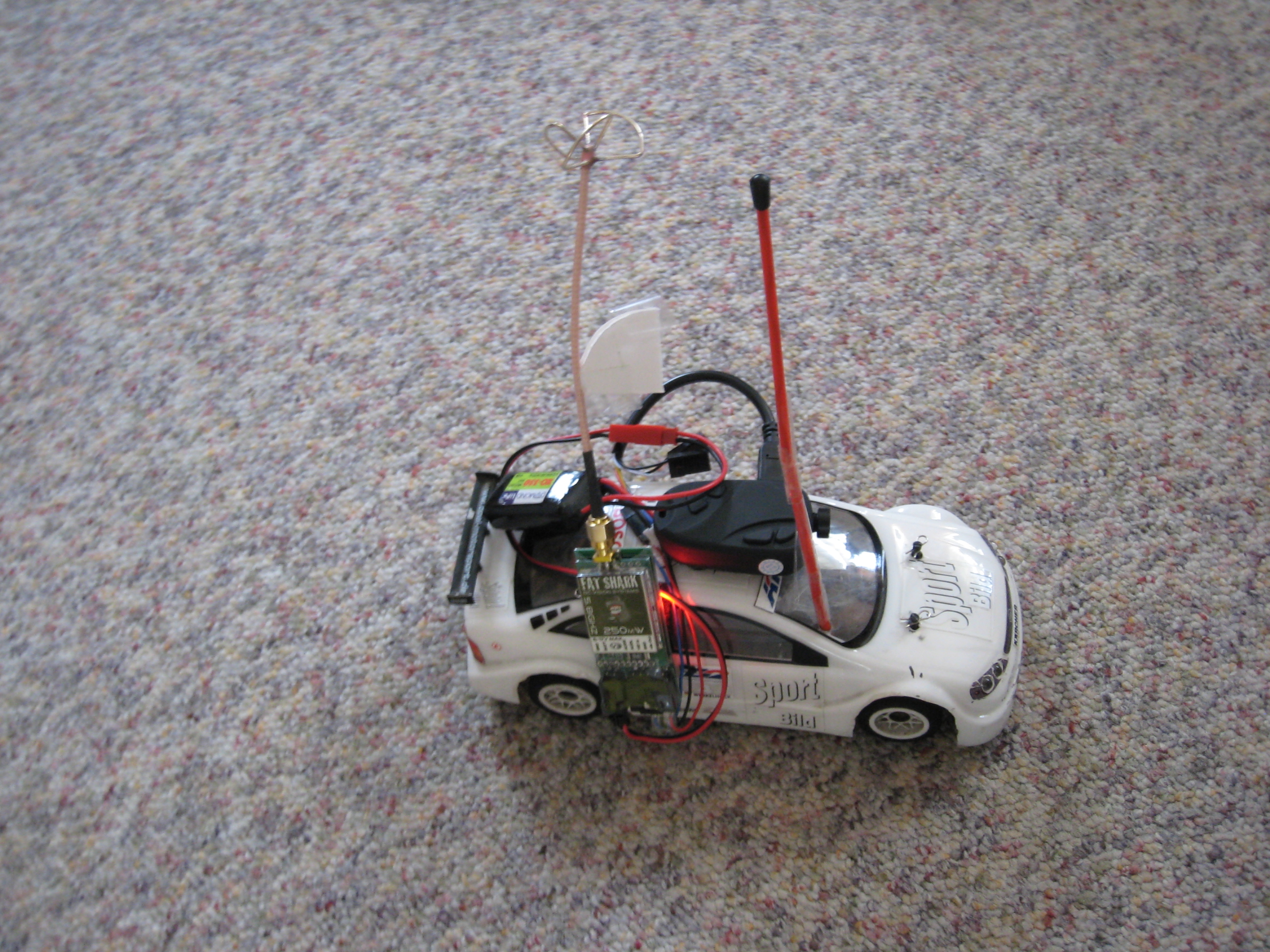
Stryker:
Festgestellt, das ein Servo einen angehenden Getriebeschaden hat (weil im Vollausschlag immer in der Schaum gefahren) – äußert sich durch lautes Knarren. Hier rächt sich, dass die DX8 keine echte Wegbegrenzung hat und in Kombination von Höhe+Quer über die 100% auf die Servos gehen kann.
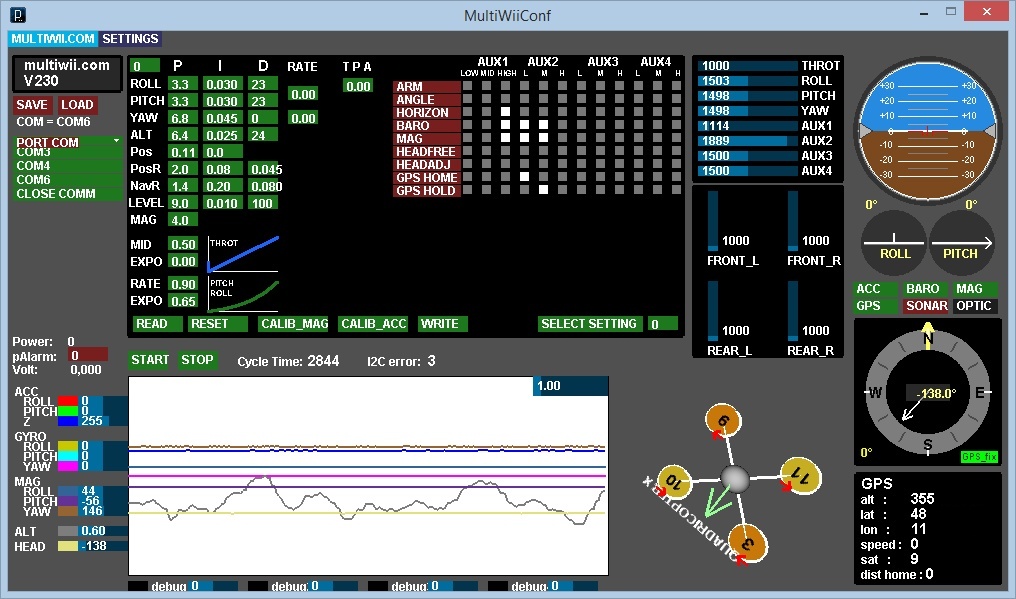
Kapa-Quad:
GPS fliegt aufschwingende Ellipsen und Kreise, ich hab zig mal rumgestellt und den Level-Mode auch nie sauber hingekriegt. Return Home fliegt ungefähr heim, aber auch hier aufschwingende Kreise.
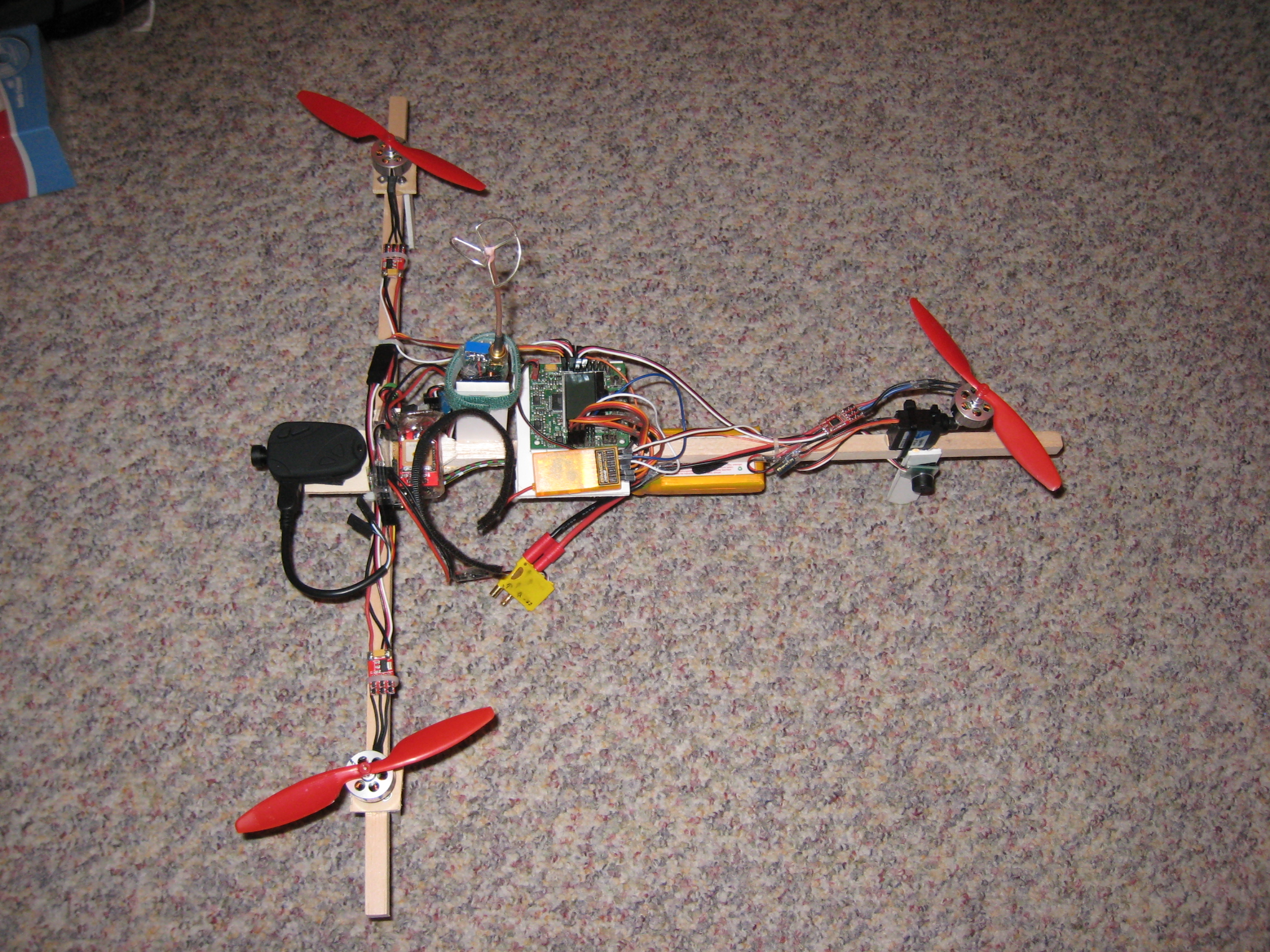
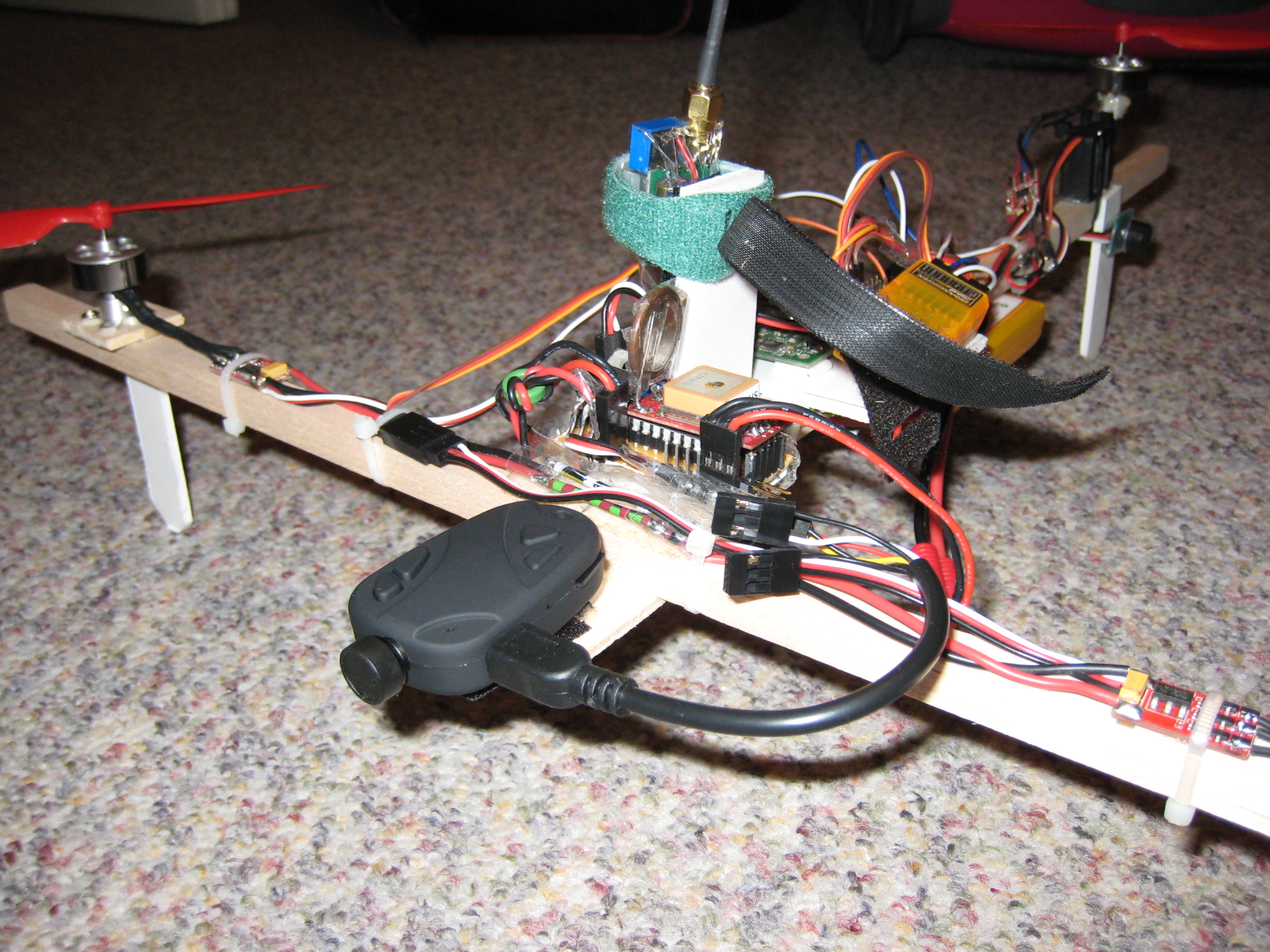
Edel-Tri:
Ich Depp flieg hinter mir rum, da wo ich zwischen Funke und Modell bin. Klar, dass ich Failsafe nach 250m kriege und ich hab da noch kein Levelmodus angelernt – der Tri macht einfach die Motoren aus – fällt wie ein Stein aus 50m. Zum Glück habe ich die Funke dann hochgehalten und konnte gerade noch abfangen und zurückfliegen. Aber das ist noch nicht alles: Neue Tests ergeben: HK Antennen Mist (viel eher Rauschen, Einstörung von der Funke), cng Antennen super.
Und zu guter Letzt: Der Carbon-Arm hat vorne beim Ausklappen sein BEC-Kabel (+) eingeklemmt und fast abgeschert – nur noch die Litze war übrig. Das hätte einen Super-Kurzschluss mit Totalausfall geben können. Der andere Arm hat irgendwann sein Motor-Signal erwischt (quasi abisoliert…).