Es war leider neblig und 1-2°C kalt.
Helmut hatte wenig Glück – zu Fuß kam er mit leichten Störungen bis zum Wiesenende ~200m. Am Copter war es dann viel weniger. Unsere Empfänger hatten etwa ähnliche Empfangsleistungen.
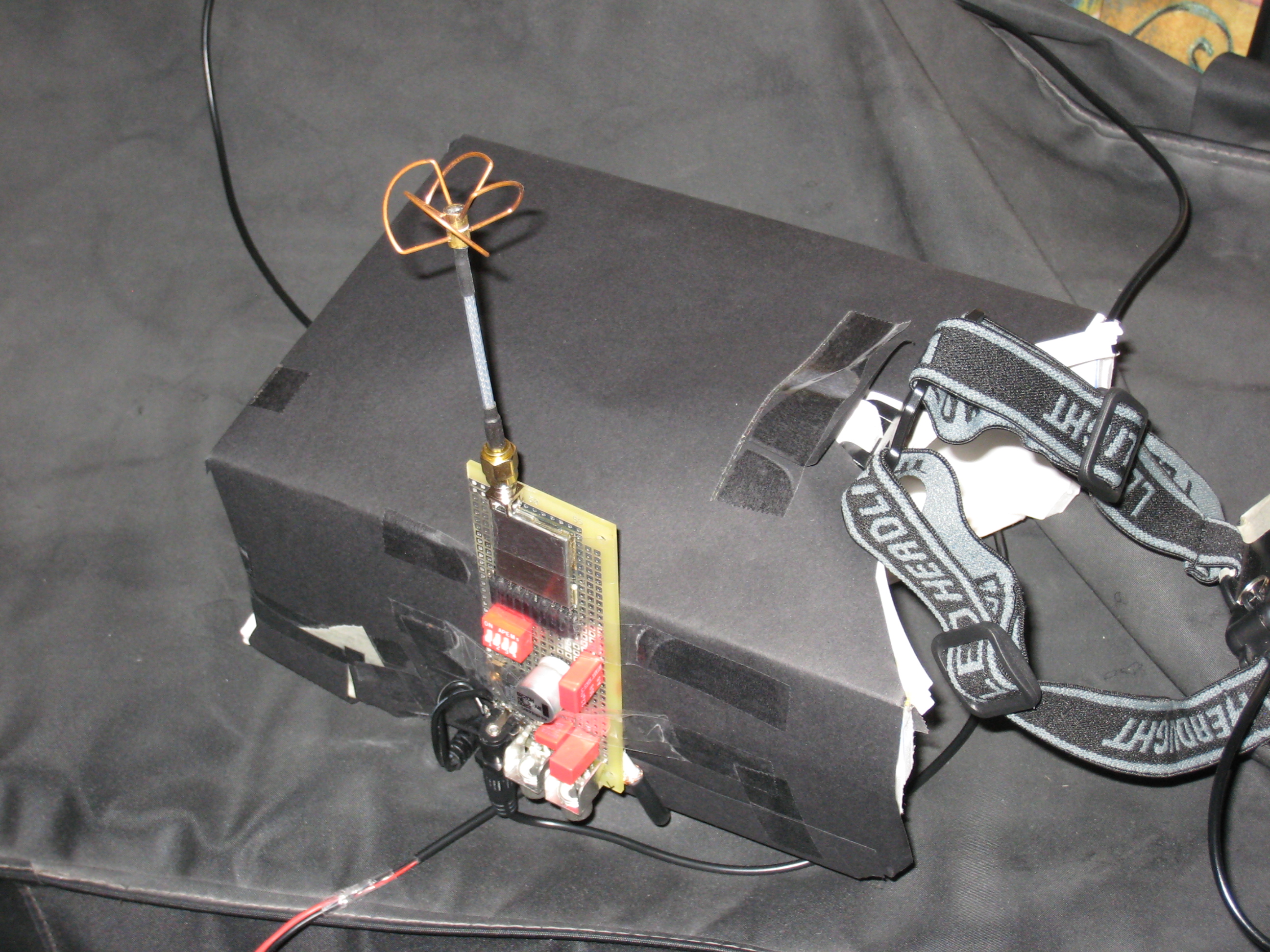
Meine Videoverbindung ging etwa 120m weit, dann wurden mir die Störungen zu stark.
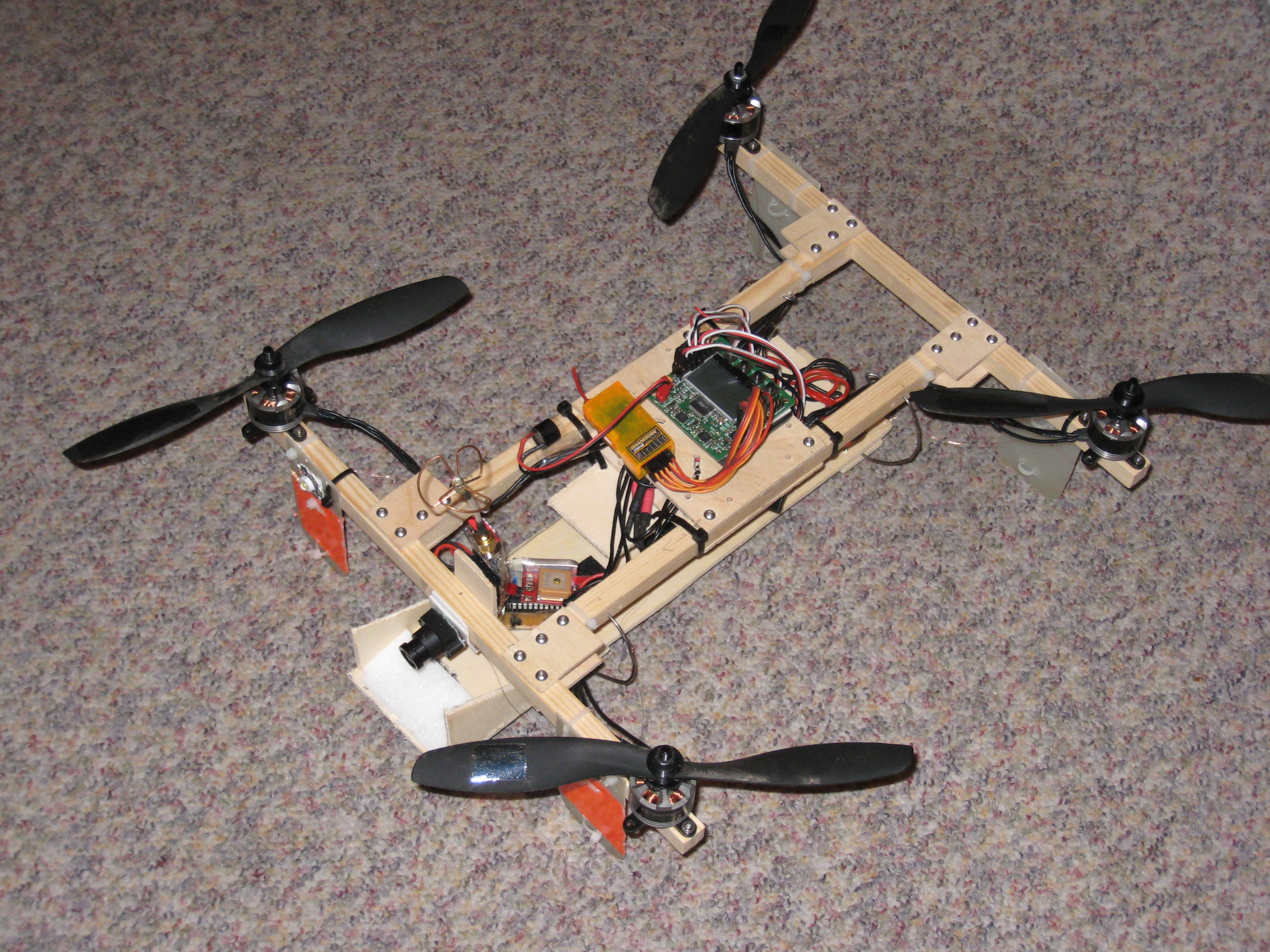
Beim Tricopter stellte ich kräftige Motorvibrationen fest und musste die Gains auf 38 reduzieren. Fliegen tut er trotzdem ok. Aber ich riss leider die Versorgungsspannung der Sony CCD Super HAD ab, so schnallte ich Helmuts Kameraeinheit mit Tape an. Wie gesagt, mit leidlicher Reichweite.



Die DX8 stört auch kräftig ins Video der Brille, ob das ins Videokabel kommt oder über HF, weiß ich nicht. Interessant ist hier, dass das bei Herrnrast noch nicht war (als die Empfängerantenne noch nicht richtig steckte).
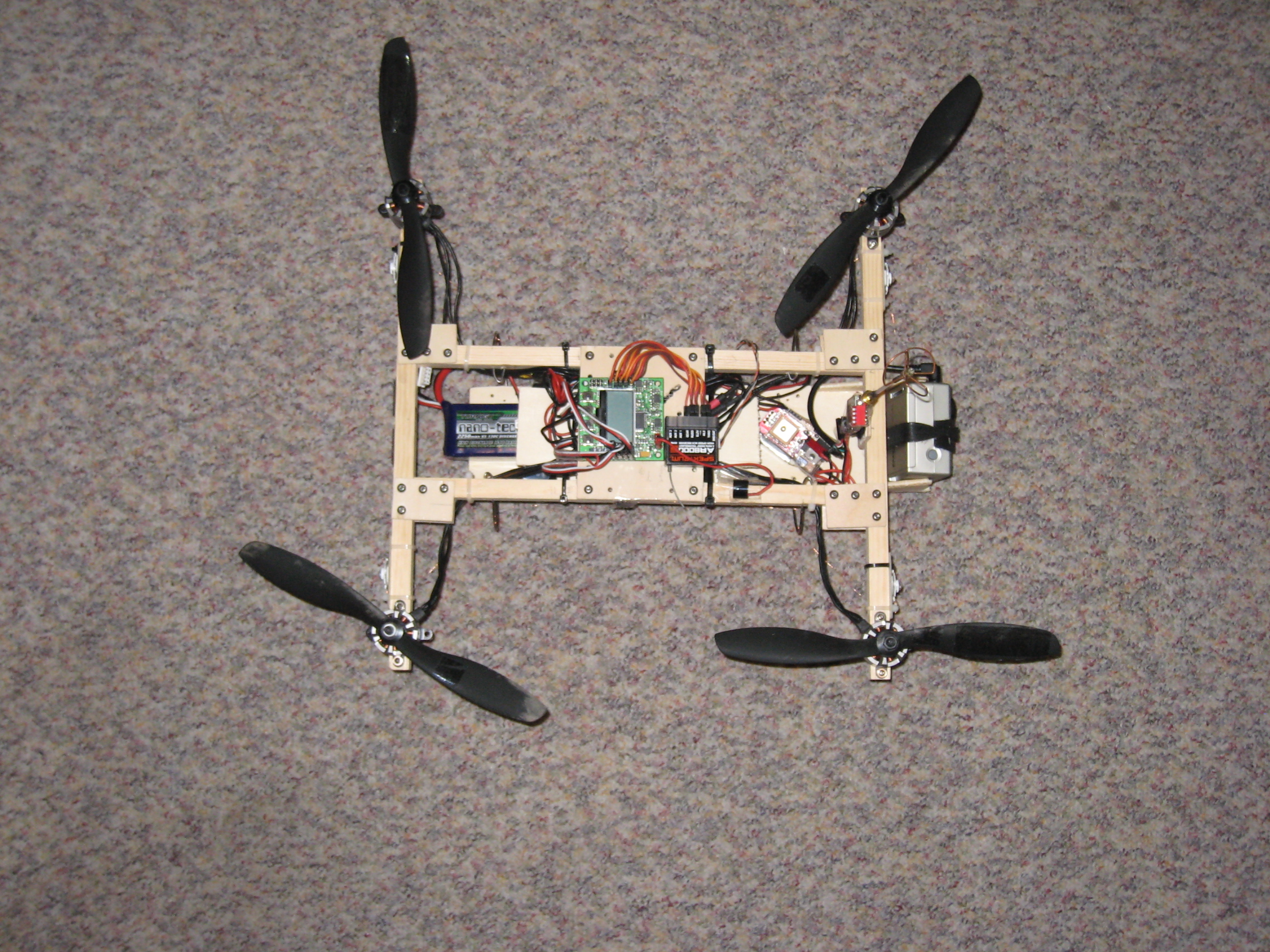
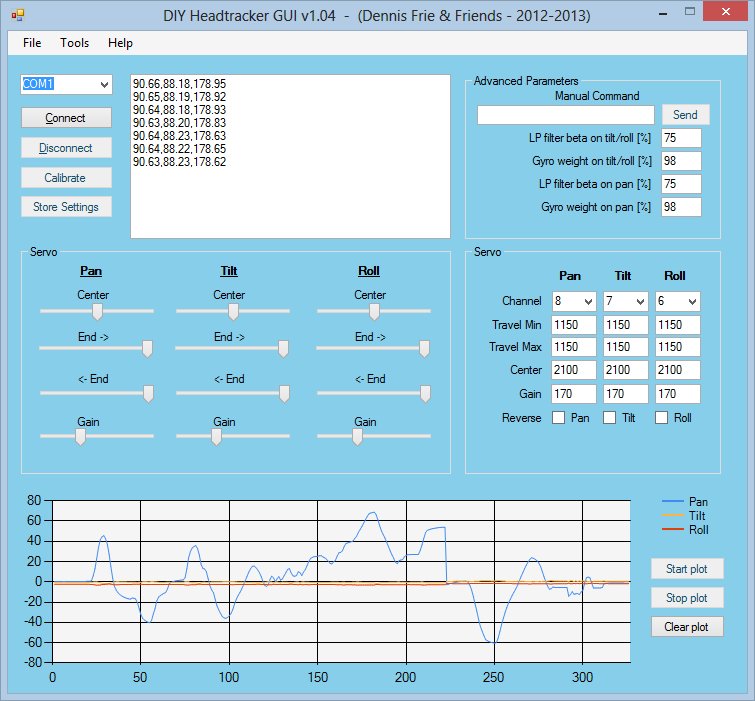
Der Quad fliegt schön sauber und das OSD funktioniert auch toll.