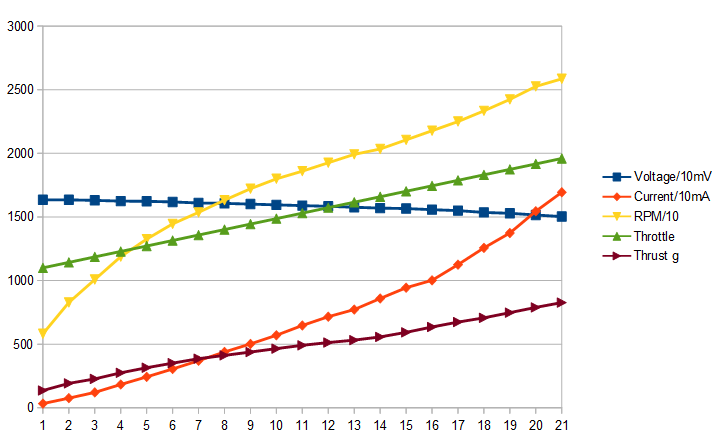
Ein Motor war etwas schwächlich – könnte an den Tischbeinen liegen, die ich alle gerammt hatte… der wurde ersetzt, jetzt stimmt die Power wieder (kein Wegkippen bei Vollgas mehr). Das Wegdrehen liegt evtl an einem leicht verdrehten Arm, das blieb.
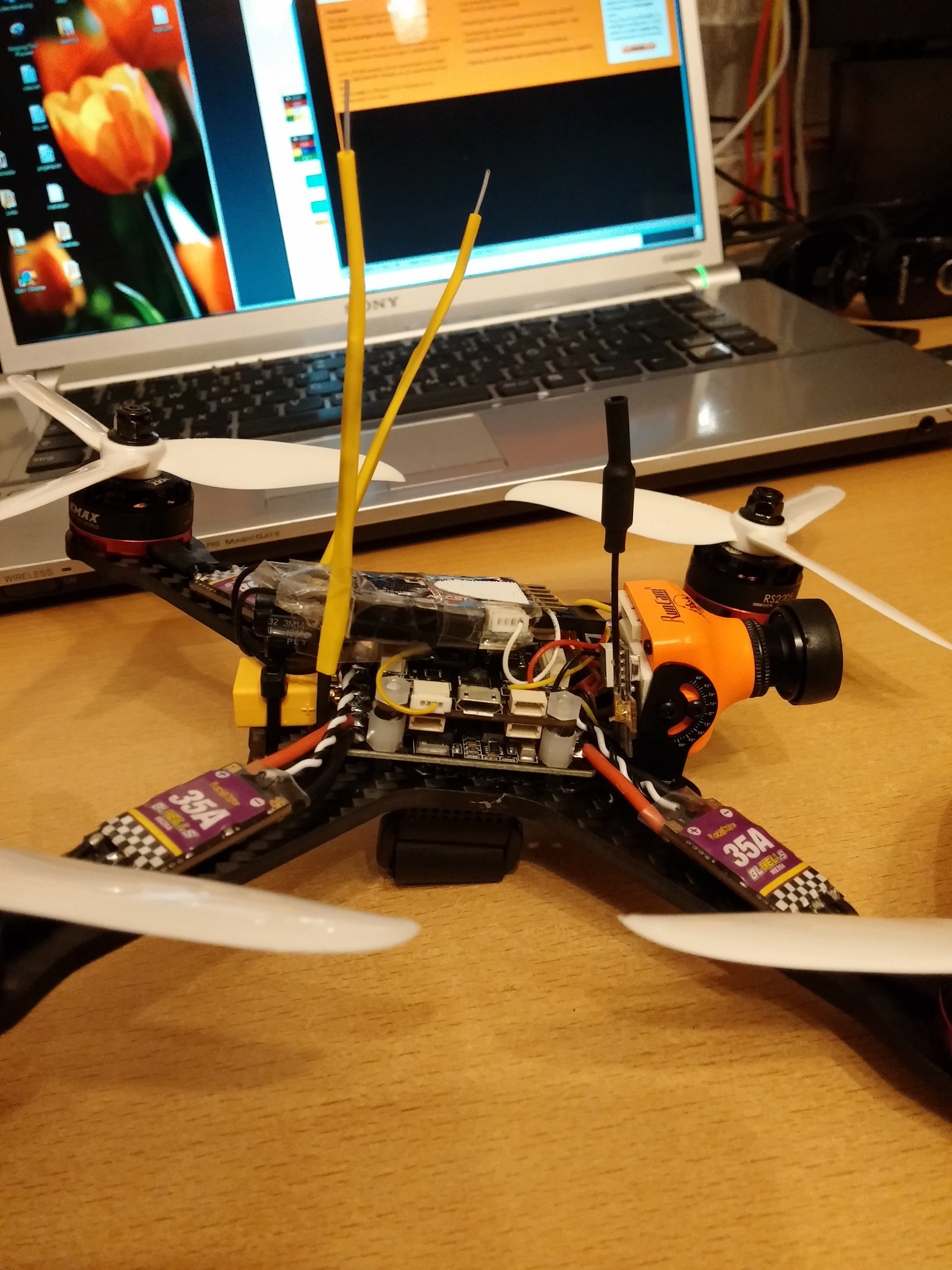
Dafür habe ich ein FPV-Setup integriert. Einen VTX03 und die alte 90°-Cam. Die werde ich wohl durch was Besseres noch ersetzen, wenn BG die 1000TVL wieder auf Lager hat.
Gewicht 44g ohne Akku. Der mitgelieferte Akku ist irgendwie auch schon durch… 100mAh bis er Akkuspannung warnt. 350 sollten es sein.