Das DJI Rennantriebssystem namens „SNAIL“ – die Rennschnecke unter den Racer-Antrieben 🙂
Der Preis: 99 Euro – eine echte Kampfansage. Denn ein guter Motor kostet gerne alleine 20 Euro oder mehr. Und ein performanter Regler geht auch in China nicht unter 12 Euro weg. KISS kosten deutlich mehr.
Enthalten: 4x Motor, 4x Regler, Kleinteile, Schrumpfschläuche und eine Anleitung
Bezug: Direkt in Deutschland zu haben (kein Chinaversand, kein Zoll, sofort da)!
DJI verspricht perfekt abgestimmte Komponenten – vom Regler bis zum Propeller. Das ist natürlich auch Marketing.
Unboxing:

Offen (links das ausführliche Datenblatt/Anleitung):

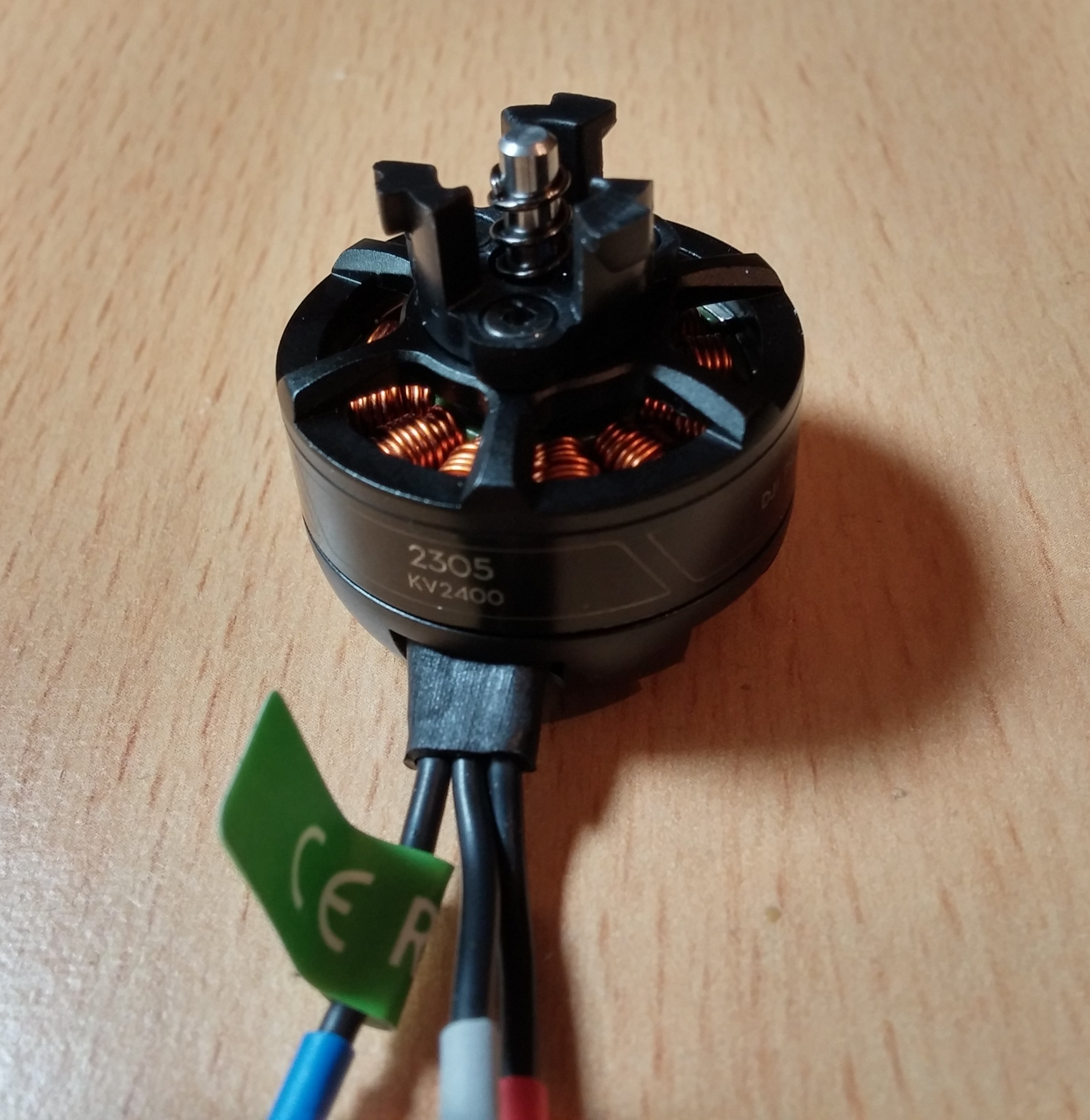
Ein Motor (2305 2400kv; nur 32,4g mit Kabel):
Die Windungen sind aus dicken Kupfer und sehr sauber. Die Motoren rasten beim Drehen gleichmäßig. Das Schnellwechselsystem ist wohl aus Kunststoff (damit sehr leicht). Aber hält es einen ordentlichen Crash aus?
Außerdem kann man die Schrauben nicht zu weit hineinschrauben – die Schraublöcher sind hinten zu! Echt mitgedacht! Alex, das ist was für dich 🙂

Schön: Die kleine Schnecke auf der Motorglocke 🙂

Es gibt extra Schrumpfschlauch (mitgedacht!) und Schrauben dazu:
So sehen die Regler in ihrer Schachtel aus:

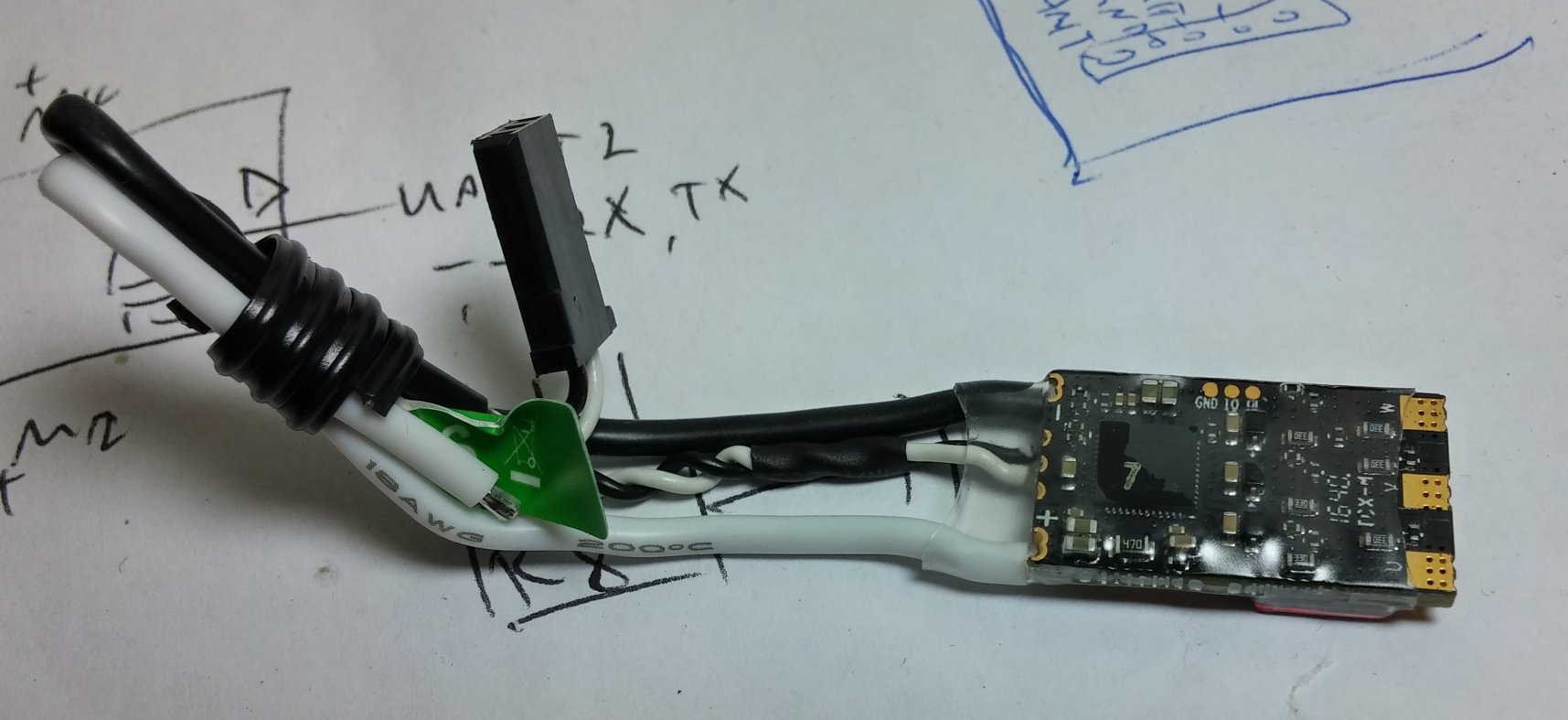
30A ESC Elektronik-Shot (der winzige 25x15mm Regler mit 6,7g liefert 30A dauerhaft):
Im Vergleich sind die LittleBee 30 oder KISS 30 wahre Monster. Kaum zu glauben, dass so kleine Regler mit 6,7g inkl. Kabel 30A Dauerlast schaffen! Sie gehen bis max. 4s (also nicht wie die großen KISS oder LittleBee 6s). Aber im Racingbetrieb hat sich mehr als 4s auch nicht durchgesetzt.

ESC Beautyshot:
Die Regler können OneShot und PWM. Ihre Beschleunigungs- und Brems-Dynamik soll sehr gut sein.

Und dazu braucht man noch 4x Propeller. Die kosten das Komplettset nur 5 Euro.
Die 5×4,8″ Propeller mit Schnellwechselsystem:

Angeblich erzeugt der Antrieb an 4s pro Motor über 1,3kg Schub (bei 30A)!
Da leiden die Lipos… bin ja mal echt gespannt, ob DJI hier den Markt aufrollt! Und vielleicht noch eine FlightControl dazu packt?