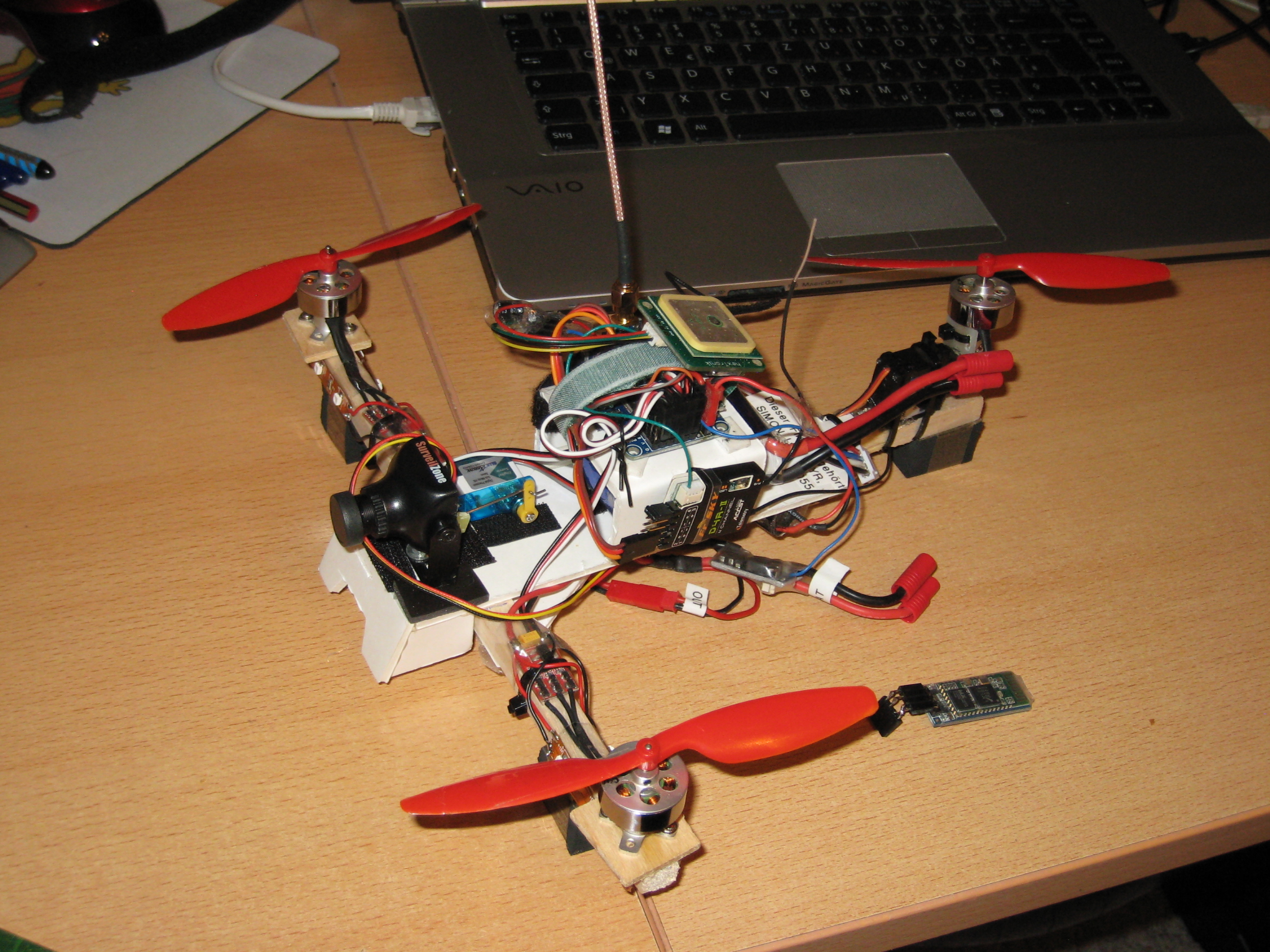
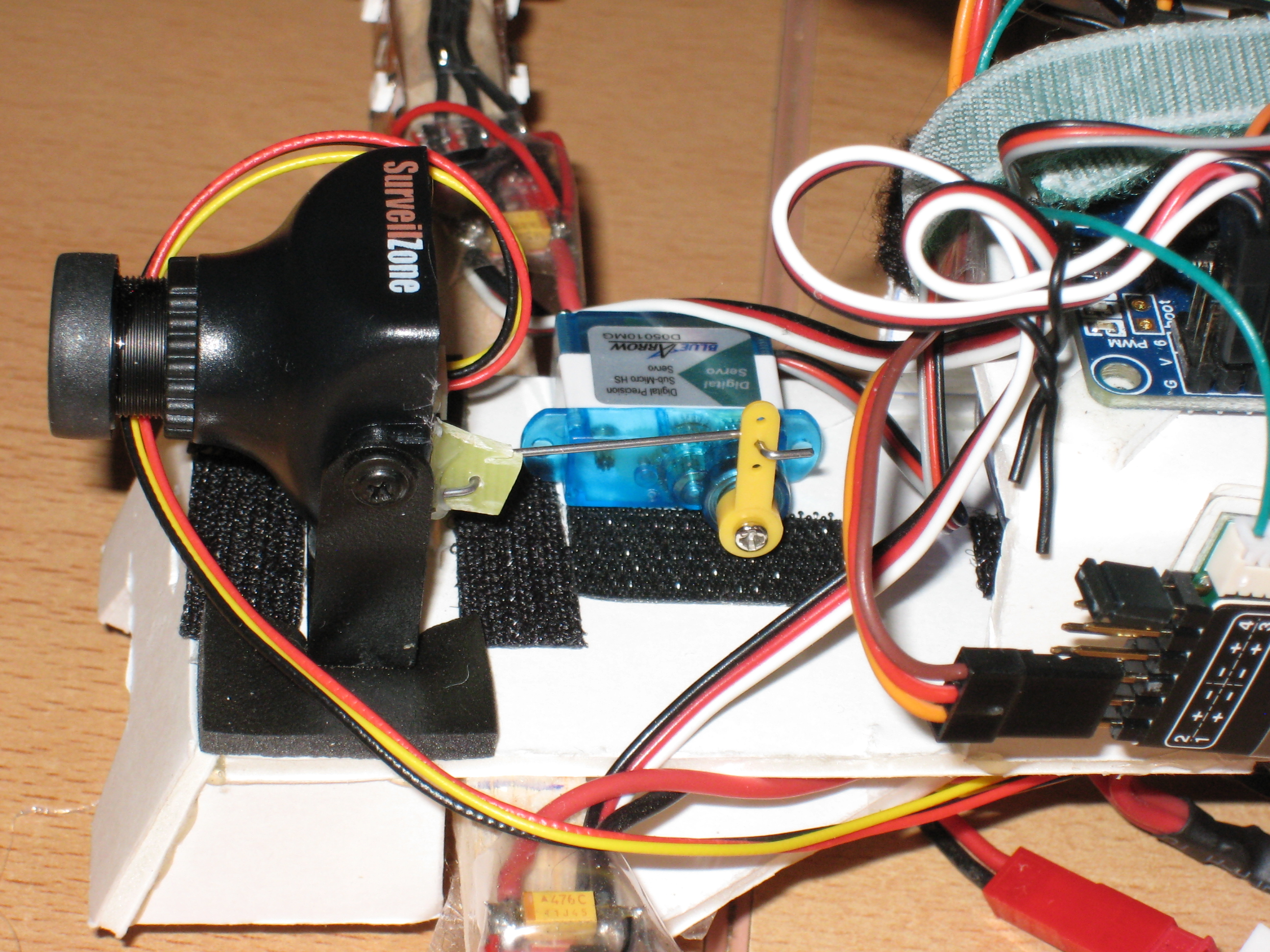
Jetzt mit Gimbal-FPV, damit ich auch beim Heizen den Durchblick behalte. Es wird einfach der Tiltkanal des Headtrackers auf das Servo durchgeschleift. Den Kamerawinkel kann ich momentan an der Taranis mit dem linken Schieber bedienen.
Und: dazu habe ich die Naze-Firmware geändert, denn im Tri-Modus ist sowas nicht vorgesehen. In eclipse kann ich ganz normal den Code editieren und mit cygwin/make bauen.
Update: Der RaceTri ist ein UHF-Monster. Da stört alles! Wenn die Motoren laufen, kommen sogar Framelosses, obwohl der Sender direkt daneben steht!